 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQoS based resource management for concurrent operation using MCTS
Feb 17, 2025



Modern AESA technology enables RF systems to not only perform various radar, communication and electronic warfare tasks on a single aperture, but even to execute multiple tasks concurrently. These capabilities increase system complexity and require intelligent or cognitive resource management. This paper introduces such a resource management framework based on quality of service based resource allocation and Monte Carlo tree search allowing for optimal system usage and profound decision-making. Furthermore, we present experimental verification in a complex application scenario.
A resource management approach for concurrent operation of RF functionalities
Jan 14, 2025



Future multifunction RF systems will be able to not only perform various different radar, communication and electronic warfare functionalities but also to perform them simultaneously on the same aperture. This ability of concurrent operations requires new, cognitive approaches of resource management compared to classical methods. This paper presents such a new approach using a combination of quality of service based resource management and Monte Carlo tree search.
Quality of Service Based Radar Resource Management for Navigation and Positioning
Jun 12, 2023



In hostile environments, GNSS is a potentially unreliable solution for self-localization and navigation. Many systems only use an IMU as a backup system, resulting in integration errors which can dramatically increase during mission execution. We suggest using a fighter radar to illuminate satellites with known trajectories to enhance the self-localization information. This technique is time-consuming and resource-demanding but necessary as other tasks depend on the self-localization accuracy. Therefore an adaption of classical resource management frameworks is required. We propose a quality of service based resource manager with capabilities to account for inter-task dependencies to optimize the self-localization update strategy. Our results show that this leads to adaptive navigation update strategies, mastering the trade-off between self-localization and the requirements of other tasks.
* 8 pages, 9 figures
Quality of service based radar resource management for synchronisation problems
Mar 03, 2023



An intelligent radar resource management is an essential building block of any modern radar system. The quality of service based resource allocation model (Q-RAM) provides a framework for profound and quantifiable decision-making but lacks a representation of inter-task dependencies that can e.g. arise for tracking and synchronisation tasks. As a consequence, synchronisation is usually performed in fixed non-optimal patterns. We present an extension of Q-RAM which enables the resource allocation to consider complex inter-task dependencies and can produce adaptive and intelligent synchronisation schemes. The provided experimental results demonstrate a significant improvement over traditional strategies.
* 4 pages, 6 figures
Quality of service based radar resource management for interference mitigation
Mar 11, 2022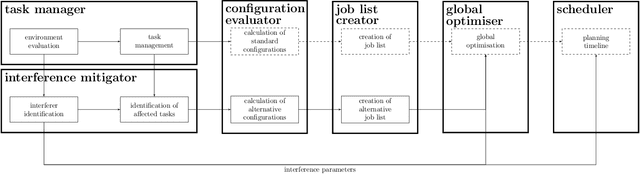



An intelligent radar resource management is an essential building block of any modern radar system. The quality of service based resource allocation model (Q-RAM) provides a framework for profound and quantifiable decision making but lacks the flexibility necessary for optimal mitigation strategies in the presence of interference. We define an extension of the Q-RAM based radar resource management framework with an intelligent interference handling capability using various mitigation methods. The approach incorporates virtual time resources and alternative task configurations to compute near-optimal solutions in the presence of interference. The provided experimental results demonstrate a significant improvement over traditional strategies.
* 4 pages, 5 figures