 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEXACT-MPPI: Exact Signed-Distance Navigation for Arbitrary-Footprint Robots from Point Clouds via Path Integral Control
May 28, 2026Ground robots often carry payloads, implements, or other attachments that turn their effective footprint into complex, non-convex shapes. Navigating safely through clutter then requires reasoning about this true geometry, yet most local planners simplify it with convex or inflated proxies and rasterize sensor data into occupancy grids or distance fields. Both choices eliminate feasible motions when clearance is comparable to the footprint geometry. We present EXACT-MPPI, a training-free local navigation framework that maps local point-cloud observations and sparse guidance directly to motion commands, without any intermediate map representation. The framework embeds an analytic, exact signed-distance evaluator into a Model Predictive Path Integral (MPPI) controller. The footprint is represented as a simple polygon for general convex or concave planar shapes, with a rectangle-cover specialization for faster evaluation of rectilinear footprints, enabling footprint-aware collision costs without convex decomposition, inflation, or learned encoders. During each MPPI rollout, observed obstacle points are transformed into the predicted body frame and evaluated against the footprint. All operations are batched in JAX, leveraging GPU parallelism for real-time receding-horizon control. Experiments show that EXACT-MPPI accelerates batched distance evaluation over a learned point-to-robot baseline, preserves feasible motion where convex-footprint planners fail, and remains robust under dense static and moving obstacles. The same framework deploys on differential-drive, Ackermann, omnidirectional, and hybrid-mode platforms by changing only the footprint description and motion model without per-platform training. Pairing exact footprint geometry with sampling-based predictive control thus offers a practical, training-free path to footprint-aware local navigation across diverse robots.
Neural Distance-Guided Path Integral Control for Tractor-Trailer Navigation
May 11, 2026Autonomous and safe navigation of tractor-trailer systems requires accurate, real-time collision avoidance and dynamically feasible control, particularly in cluttered and complex agricultural environments. This is challenging due to their articulated, deformable geometries and nonlinear dynamics. Traditional methods oversimplify vehicle geometry or rely on precomputed distance fields that assume a known map, limiting their applicability in dynamic, partially unknown environments. To address these limitations, we propose a geometric neural encoder that provides fast and accurate distance estimates between the full tractor-trailer body and raw LiDAR perception, enabling real-time, map-free geometric reasoning. These learned distances are integrated into a Model Predictive Path Integral (MPPI) controller, allowing the system to incorporate true articulated geometry directly into its cost evaluation and enabling more responsive navigation in challenging agricultural settings. Simulation results demonstrate that the proposed framework generates dynamically feasible and safe trajectories for navigating tractor-trailer systems in cluttered and complex environments.
Fast Heuristic Scheduling and Trajectory Planning for Robotic Fruit Harvesters with Multiple Cartesian Arms
May 15, 2025



This work proposes a fast heuristic algorithm for the coupled scheduling and trajectory planning of multiple Cartesian robotic arms harvesting fruits. Our method partitions the workspace, assigns fruit-picking sequences to arms, determines tight and feasible fruit-picking schedules and vehicle travel speed, and generates smooth, collision-free arm trajectories. The fruit-picking throughput achieved by the algorithm was assessed using synthetically generated fruit coordinates and a harvester design featuring up to 12 arms. The throughput increased monotonically as more arms were added. Adding more arms when fruit densities were low resulted in diminishing gains because it took longer to travel from one fruit to another. However, when there were enough fruits, the proposed algorithm achieved a linear speedup as the number of arms increased.
Efficient and Safe Trajectory Planning for Autonomous Agricultural Vehicle Headland Turning in Cluttered Orchard Environments
Jan 18, 2025



Autonomous agricultural vehicles (AAVs), including field robots and autonomous tractors, are becoming essential in modern farming by improving efficiency and reducing labor costs. A critical task in AAV operations is headland turning between crop rows. This task is challenging in orchards with limited headland space, irregular boundaries, operational constraints, and static obstacles. While traditional trajectory planning methods work well in arable farming, they often fail in cluttered orchard environments. This letter presents a novel trajectory planner that enhances the safety and efficiency of AAV headland maneuvers, leveraging advancements in autonomous driving. Our approach includes an efficient front-end algorithm and a high-performance back-end optimization. Applied to vehicles with various implements, it outperforms state-of-the-art methods in both standard and challenging orchard fields. This work bridges agricultural and autonomous driving technologies, facilitating a broader adoption of AAVs in complex orchards.
A strawberry harvest-aiding system with crop-transport co-robots: Design, development, and field evaluation
Jul 27, 2021

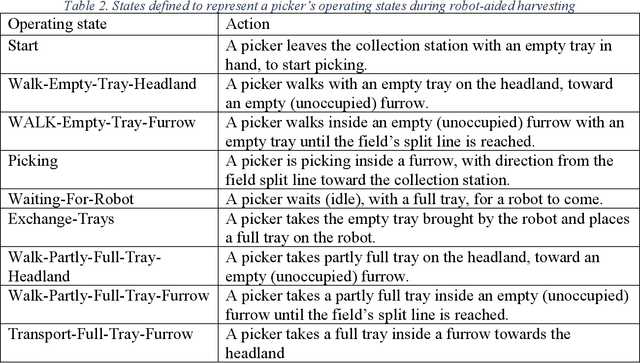
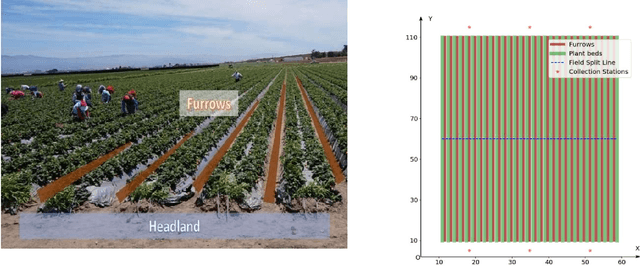
Mechanizing the manual harvesting of fresh market fruits constitutes one of the biggest challenges to the sustainability of the fruit industry. During manual harvesting of some fresh-market crops like strawberries and table grapes, pickers spend significant amounts of time walking to carry full trays to a collection station at the edge of the field. A step toward increasing harvest automation for such crops is to deploy harvest-aid collaborative robots (co-bots) that transport the empty and full trays, thus increasing harvest efficiency by reducing pickers' non-productive walking times. This work presents the development of a co-robotic harvest-aid system and its evaluation during commercial strawberry harvesting. At the heart of the system lies a predictive stochastic scheduling algorithm that minimizes the expected non-picking time, thus maximizing the harvest efficiency. During the evaluation experiments, the co-robots improved the mean harvesting efficiency by around 10% and reduced the mean non-productive time by 60%, when the robot-to-picker ratio was 1:3. The concepts developed in this work can be applied to robotic harvest-aids for other manually harvested crops that involve walking for crop transportation.
Row-sensing Templates: A Generic 3D Sensor-based Approach to Robot Localization with Respect to Orchard Row Centerlines
Jul 03, 2021



Accurate robot localization relative to orchard row centerlines is essential for autonomous guidance where satellite signals are often obstructed by foliage. Existing sensor-based approaches rely on various features extracted from images and point clouds. However, any selected features are not available consistently, because the visual and geometrical characteristics of orchard rows change drastically when tree types, growth stages, canopy management practices, seasons, and weather conditions change. In this work, we introduce a novel localization method that doesn't rely on features; instead, it relies on the concept of a row-sensing template, which is the expected observation of a 3D sensor traveling in an orchard row, when the sensor is anywhere on the centerline and perfectly aligned with it. First, the template is built using a few measurements, provided that the sensor's true pose with respect to the centerline is available. Then, during navigation, the best pose estimate (and its confidence) is estimated by maximizing the match between the template and the sensed point cloud using particle-filtering. The method can adapt to various orchards and conditions by re-building the template. Experiments were performed in a vineyard, and in an orchard in different seasons. Results showed that the lateral mean absolute error (MAE) was less than 3.6% of the row width, and the heading MAE was less than 1.72 degrees. Localization was robust, as errors didn't increase when less than 75% of measurement points were missing. The results indicate that template-based localization can provide a generic approach for accurate and robust localization in real-world orchards.