 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent Prioritization for Autonomous Navigation
Sep 19, 2019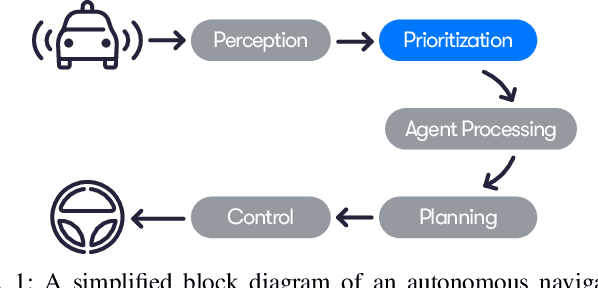
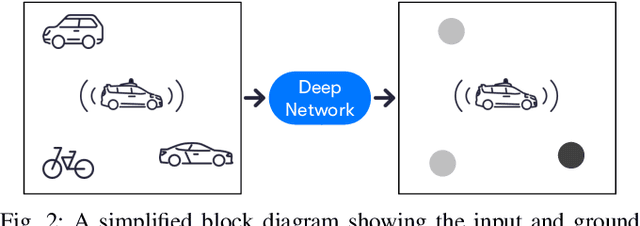
In autonomous navigation, a planning system reasons about other agents to plan a safe and plausible trajectory. Before planning starts, agents are typically processed with computationally intensive models for recognition, tracking, motion estimation and prediction. With limited computational resources and a large number of agents to process in real time, it becomes important to efficiently rank agents according to their impact on the decision making process. This allows spending more time processing the most important agents. We propose a system to rank agents around an autonomous vehicle (AV) in real time. We automatically generate a ranking data set by running the planner in simulation on real-world logged data, where we can afford to run more accurate and expensive models on all the agents. The causes of various planner actions are logged and used for assigning ground truth importance scores. The generated data set can be used to learn ranking models. In particular, we show the utility of combining learned features, via a convolutional neural network, with engineered features designed to capture domain knowledge. We show the benefits of various design choices experimentally. When tested on real AVs, our system demonstrates the capability of understanding complex driving situations.
Online Planning Algorithms for POMDPs
Jan 15, 2014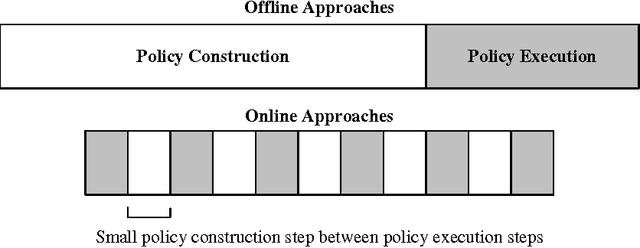
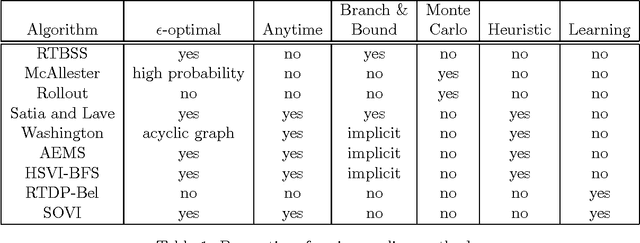
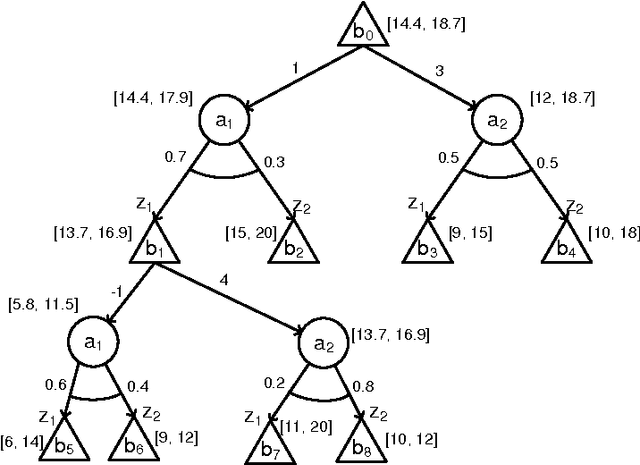

Partially Observable Markov Decision Processes (POMDPs) provide a rich framework for sequential decision-making under uncertainty in stochastic domains. However, solving a POMDP is often intractable except for small problems due to their complexity. Here, we focus on online approaches that alleviate the computational complexity by computing good local policies at each decision step during the execution. Online algorithms generally consist of a lookahead search to find the best action to execute at each time step in an environment. Our objectives here are to survey the various existing online POMDP methods, analyze their properties and discuss their advantages and disadvantages; and to thoroughly evaluate these online approaches in different environments under various metrics (return, error bound reduction, lower bound improvement). Our experimental results indicate that state-of-the-art online heuristic search methods can handle large POMDP domains efficiently.