 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Path Planning Strategies for Efficient Nitrate Sampling in Crop Rows
Mar 10, 2025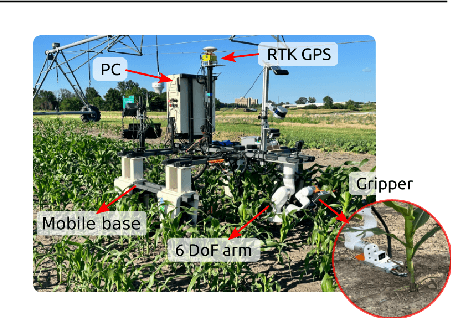
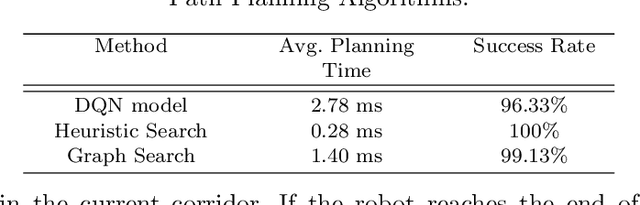
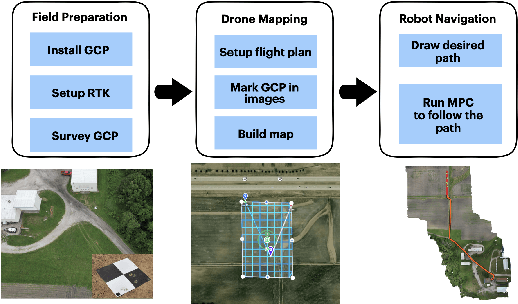
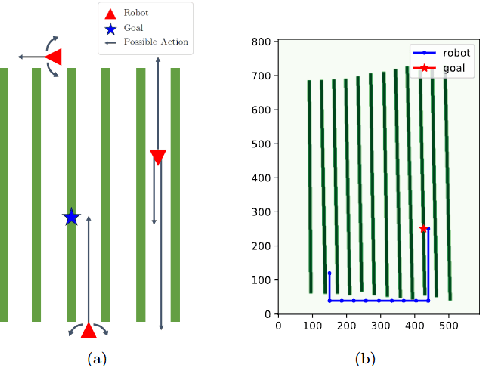
This paper presents a pipeline that combines high-resolution orthomosaic maps generated from UAS imagery with GPS-based global navigation to guide a skid-steered ground robot. We evaluated three path planning strategies: A* Graph search, Deep Q-learning (DQN) model, and Heuristic search, benchmarking them on planning time and success rate in realistic simulation environments. Experimental results reveal that the Heuristic search achieves the fastest planning times (0.28 ms) and a 100% success rate, while the A* approach delivers near-optimal performance, and the DQN model, despite its adaptability, incurs longer planning delays and occasional suboptimal routing. These results highlight the advantages of deterministic rule-based methods in geometrically constrained crop-row environments and lay the groundwork for future hybrid strategies in precision agriculture.
Stereo Visual Inertial LiDAR Simultaneous Localization and Mapping
Feb 27, 2019



Simultaneous Localization and Mapping (SLAM) is a fundamental task to mobile and aerial robotics. LiDAR based systems have proven to be superior compared to vision based systems due to its accuracy and robustness. In spite of its superiority, pure LiDAR based systems fail in certain degenerate cases like traveling through a tunnel. We propose Stereo Visual Inertial LiDAR (VIL) SLAM that performs better on these degenerate cases and has comparable performance on all other cases. VIL-SLAM accomplishes this by incorporating tightly-coupled stereo visual inertial odometry (VIO) with LiDAR mapping and LiDAR enhanced visual loop closure. The system generates loop-closure corrected 6-DOF LiDAR poses in real-time and 1cm voxel dense maps near real-time. VIL-SLAM demonstrates improved accuracy and robustness compared to state-of-the-art LiDAR methods.