 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Path Planning Strategies for Efficient Nitrate Sampling in Crop Rows
Paper and Code
Mar 10, 2025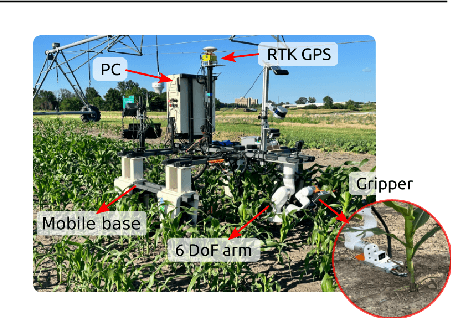
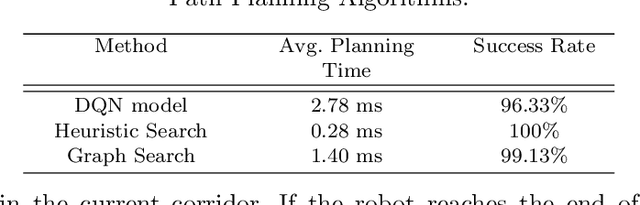
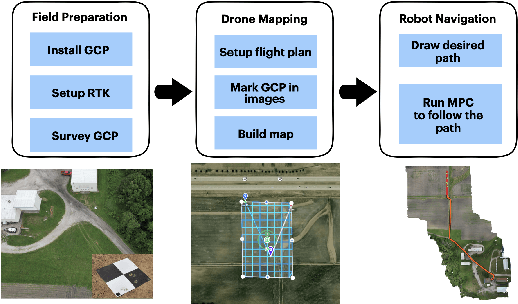
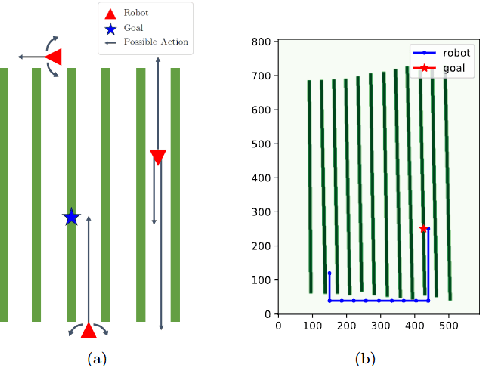
This paper presents a pipeline that combines high-resolution orthomosaic maps generated from UAS imagery with GPS-based global navigation to guide a skid-steered ground robot. We evaluated three path planning strategies: A* Graph search, Deep Q-learning (DQN) model, and Heuristic search, benchmarking them on planning time and success rate in realistic simulation environments. Experimental results reveal that the Heuristic search achieves the fastest planning times (0.28 ms) and a 100% success rate, while the A* approach delivers near-optimal performance, and the DQN model, despite its adaptability, incurs longer planning delays and occasional suboptimal routing. These results highlight the advantages of deterministic rule-based methods in geometrically constrained crop-row environments and lay the groundwork for future hybrid strategies in precision agriculture.