 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvable Probabilistic Safety and Feasibility-Assured Control for Autonomous Vehicles using Exponential Control Barrier Functions
May 08, 2022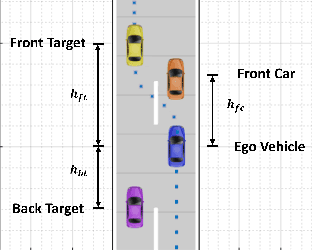
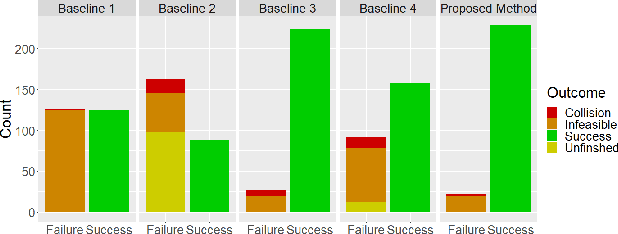
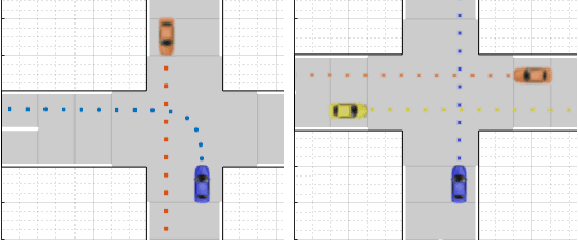
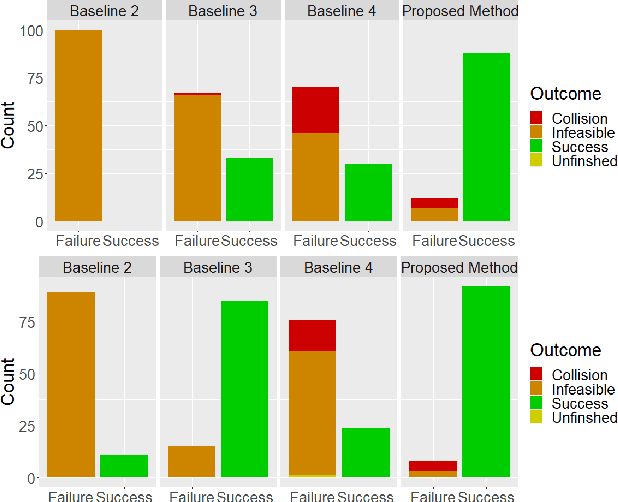
With the increasing need for safe control in the domain of autonomous driving, model-based safety-critical control approaches are widely used, especially Control Barrier Function (CBF)-based approaches. Among them, Exponential CBF (eCBF) is particularly popular due to its realistic applicability to high-relative-degree systems. However, for most of the optimization-based controllers utilizing CBF-based constraints, solution feasibility is a common issue arising from potential conflict among different constraints. Moreover, how to incorporate uncertainty into the eCBF-based constraints in high-relative-degree systems to account for safety remains an open challenge. In this paper, we present a novel approach to extend an eCBF-based safe critical controller to a probabilistic setting to handle potential motion uncertainty from system dynamics. More importantly, we leverage an optimization-based technique to provide a solution feasibility guarantee in run time, while ensuring probabilistic safety. Lane changing and intersection handling are demonstrated as two use cases, and experiment results are provided to show the effectiveness of the proposed approach.