 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Personality-Driven Personalization in XAI: Enhancing User Trust in Gameplay
Aug 08, 2024Tailoring XAI methods to individual needs is crucial for intuitive Human-AI interactions. While context and task goals are vital, factors like user personality traits could also influence method selection. Our study investigates using personality traits to predict user preferences among decision trees, texts, and factor graphs. We trained a Machine Learning model on responses to the Big Five personality test to predict preferences. Deploying these predicted preferences in a navigation game (n=6), we found users more receptive to personalized XAI recommendations, enhancing trust in the system. This underscores the significance of customization in XAI interfaces, impacting user engagement and confidence.
Advanced Autonomy on a Low-Cost Educational Drone Platform
Oct 08, 2019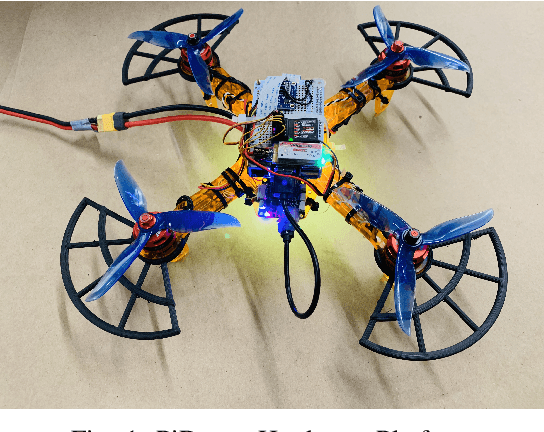
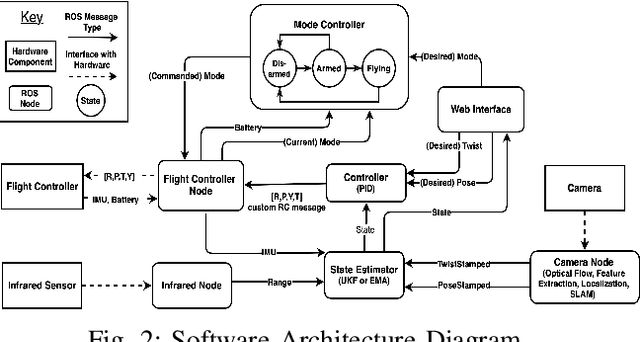
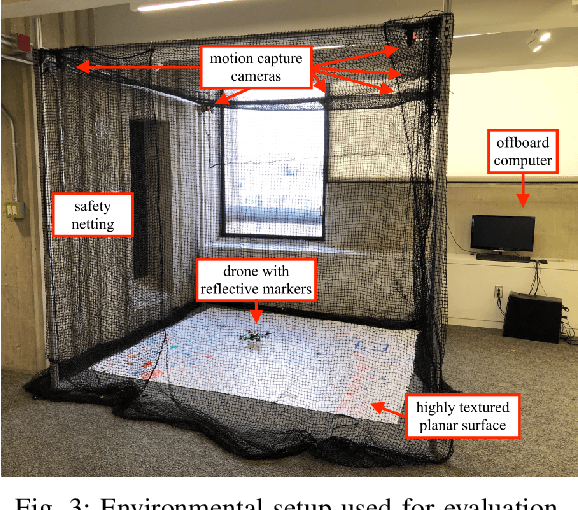
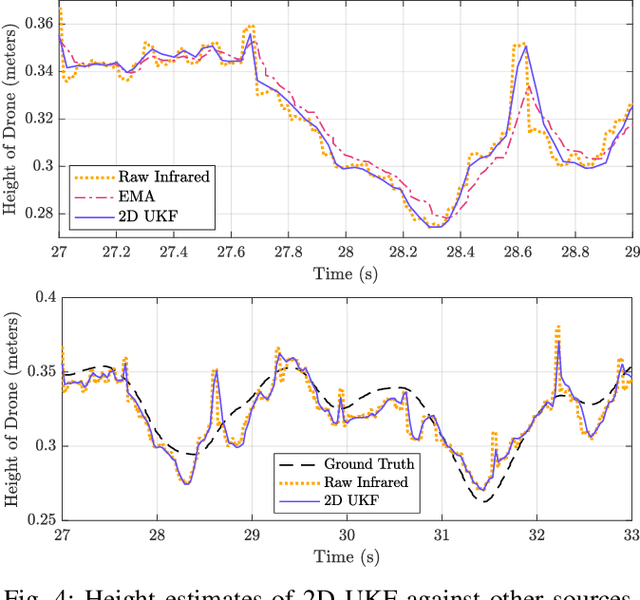
PiDrone is a quadrotor platform created to accompany an introductory robotics course. Students build an autonomous flying robot from scratch and learn to program it through assignments and projects. Existing educational robots do not have significant autonomous capabilities, such as high-level planning and mapping. We present a hardware and software framework for an autonomous aerial robot, in which all software for autonomy can run onboard the drone, implemented in Python. We present an Unscented Kalman Filter (UKF) for accurate state estimation. Next, we present an implementation of Monte Carlo (MC) Localization and FastSLAM for Simultaneous Localization and Mapping (SLAM). The performance of UKF, localization, and SLAM is tested and compared to ground truth, provided by a motion-capture system. Our evaluation demonstrates that our autonomous educational framework runs quickly and accurately on a Raspberry Pi in Python, making it ideal for use in educational settings.