 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Tourism Flow with Sparse Geolocation Data
Aug 28, 2023Modern tourism in the 21st century is facing numerous challenges. Among these the rapidly growing number of tourists visiting space-limited regions like historical cities, museums and bottlenecks such as bridges is one of the biggest. In this context, a proper and accurate prediction of tourism volume and tourism flow within a certain area is important and critical for visitor management tasks such as sustainable treatment of the environment and prevention of overcrowding. Static flow control methods like conventional low-level controllers or limiting access to overcrowded venues could not solve the problem yet. In this paper, we empirically evaluate the performance of state-of-the-art deep-learning methods such as RNNs, GNNs, and Transformers as well as the classic statistical ARIMA method. Granular limited data supplied by a tourism region is extended by exogenous data such as geolocation trajectories of individual tourists, weather and holidays. In the field of visitor flow prediction with sparse data, we are thereby capable of increasing the accuracy of our predictions, incorporating modern input feature handling as well as mapping geolocation data on top of discrete POI data.
Robustness Analysis of Continuous-Depth Models with Lagrangian Techniques
Aug 23, 2023This paper presents, in a unified fashion, deterministic as well as statistical Lagrangian-verification techniques. They formally quantify the behavioral robustness of any time-continuous process, formulated as a continuous-depth model. To this end, we review LRT-NG, SLR, and GoTube, algorithms for constructing a tight reachtube, that is, an over-approximation of the set of states reachable within a given time-horizon, and provide guarantees for the reachtube bounds. We compare the usage of the variational equations, associated to the system equations, the mean value theorem, and the Lipschitz constants, in achieving deterministic and statistical guarantees. In LRT-NG, the Lipschitz constant is used as a bloating factor of the initial perturbation, to compute the radius of an ellipsoid in an optimal metric, which over-approximates the set of reachable states. In SLR and GoTube, we get statistical guarantees, by using the Lipschitz constants to compute local balls around samples. These are needed to calculate the probability of having found an upper bound, of the true maximum perturbation at every timestep. Our experiments demonstrate the superior performance of Lagrangian techniques, when compared to LRT, Flow*, and CAPD, and illustrate their use in the robustness analysis of various continuous-depth models.
* arXiv admin note: text overlap with arXiv:2107.08467
Deep-Learning vs Regression: Prediction of Tourism Flow with Limited Data
Jun 27, 2022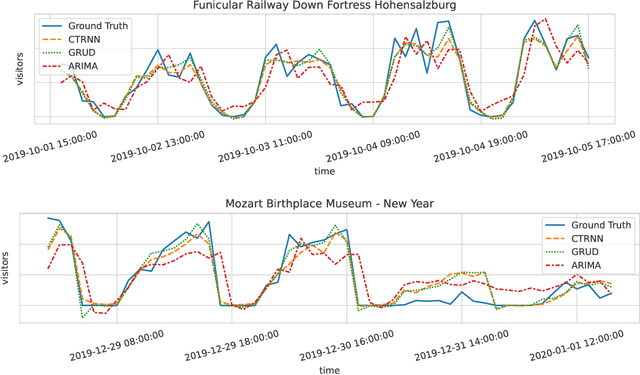
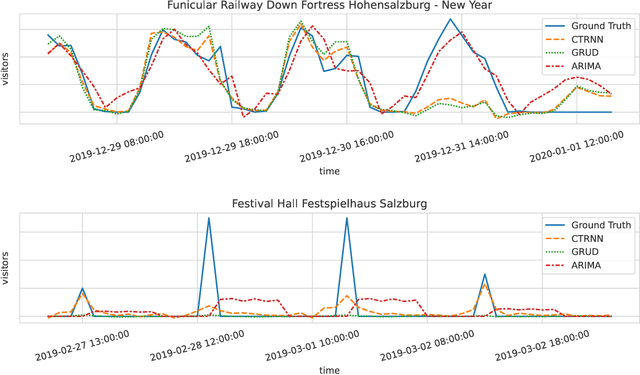
Modern tourism in the 21st century is facing numerous challenges. One of these challenges is the rapidly growing number of tourists in space limited regions such as historical city centers, museums or geographical bottlenecks like narrow valleys. In this context, a proper and accurate prediction of tourism volume and tourism flow within a certain area is important and critical for visitor management tasks such as visitor flow control and prevention of overcrowding. Static flow control methods like limiting access to hotspots or using conventional low level controllers could not solve the problem yet. In this paper, we empirically evaluate the performance of several state-of-the-art deep-learning methods in the field of visitor flow prediction with limited data by using available granular data supplied by a tourism region and comparing the results to ARIMA, a classical statistical method. Our results show that deep-learning models yield better predictions compared to the ARIMA method, while both featuring faster inference times and being able to incorporate additional input features.