 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA 4-DoF Parallel Origami Haptic Device for Normal, Shear, and Torsion Feedback
Sep 24, 2021



We present a mesoscale finger-mounted 4-degree-of-freedom (DoF) haptic device that is created using origami fabrication techniques. The 4-DoF device is a parallel kinematic mechanism capable of delivering normal, shear, and torsional haptic feedback to the fingertip. Traditional methods of robot fabrication are not well suited for designing small robotic devices because it is challenging and expensive to manufacture small, low-friction joints. Our device uses origami manufacturing principles to reduce complexity and the device footprint. We characterize the bandwidth, workspace, and force output of the device. The capabilities of the torsion-DoF are demonstrated in a virtual reality scenario. Our results show that the device can deliver haptic feedback in 4-DoFs with an effective operational workspace of 0.64cm$^3$ with $\pm 30 ^ \circ$ rotation at every location. The maximum forces and torques the device can apply in the x-, y-, z-, and $\theta$-directions, are $\pm$1.5N, $\pm$1.5N, 2N, and 5N$\cdot$mm, respectively, and the device has an operating bandwidth of 9Hz.
Understanding Continuous and Pleasant Linear Sensations on the Forearm from a Sequential Discrete Lateral Skin-Slip Haptic Device
Sep 03, 2019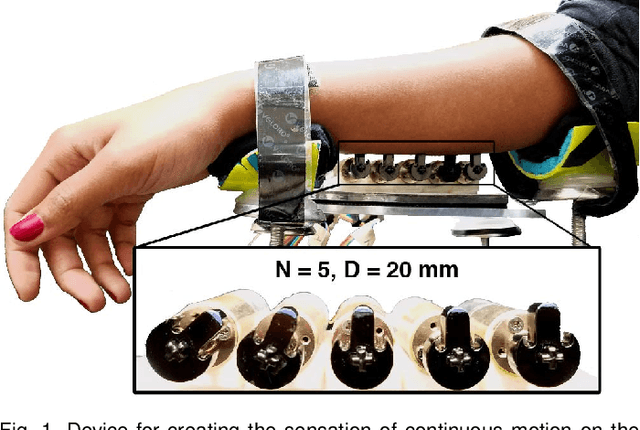

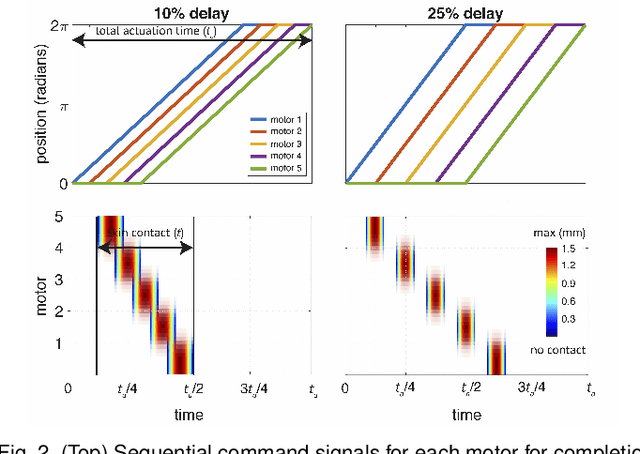

A continuous stroking sensation on the skin can convey messages or emotion cues. We seek to induce this sensation using a combination of illusory motion and lateral stroking via a haptic device. Our system provides discrete lateral skin-slip on the forearm with rotating tactors, which independently provide lateral skin-slip in a timed sequence. We vary the sensation by changing the angular velocity and delay between adjacent tactors, such that the apparent speed of the perceived stroke ranges from 2.5 to 48.2 cm/s. We investigated which actuation parameters create the most pleasant and continuous sensations through a user study with 16 participants. On average, the sensations were rated by participants as both continuous and pleasant. The most continuous and pleasant sensations were created by apparent speeds of 7.7 and 5.1 cm/s, respectively. We also investigated the effect of spacing between contact points on the pleasantness and continuity of the stroking sensation, and found that the users experience a pleasant and continuous linear sensation even when the space between contact points is relatively large (40 mm). Understanding how sequential discrete lateral skin-slip creates continuous linear sensations can influence the design and control of future wearable haptic devices.