 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA.X K1 Technical Report
Jan 15, 2026We introduce A.X K1, a 519B-parameter Mixture-of-Experts (MoE) language model trained from scratch. Our design leverages scaling laws to optimize training configurations and vocabulary size under fixed computational budgets. A.X K1 is pre-trained on a corpus of approximately 10T tokens, curated by a multi-stage data processing pipeline. Designed to bridge the gap between reasoning capability and inference efficiency, A.X K1 supports explicitly controllable reasoning to facilitate scalable deployment across diverse real-world scenarios. We propose a simple yet effective Think-Fusion training recipe, enabling user-controlled switching between thinking and non-thinking modes within a single unified model. Extensive evaluations demonstrate that A.X K1 achieves performance competitive with leading open-source models, while establishing a distinctive advantage in Korean-language benchmarks.
Keeping Less is More: Point Sparsification for Visual SLAM
Jul 01, 2022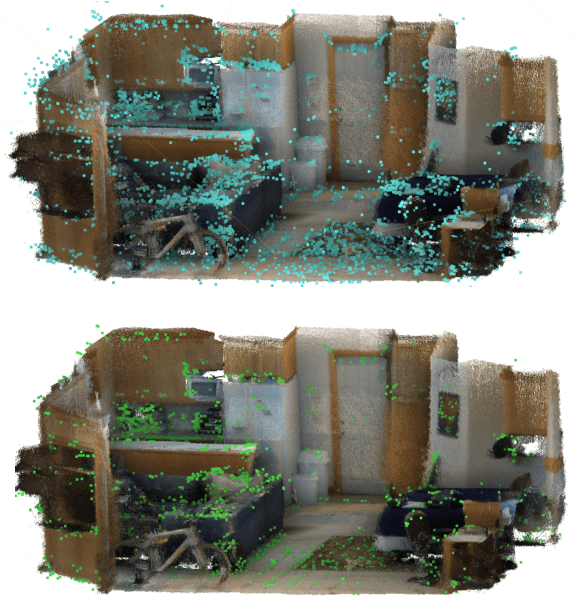
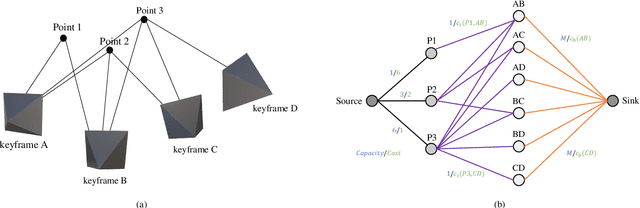


When adapting Simultaneous Mapping and Localization (SLAM) to real-world applications, such as autonomous vehicles, drones, and augmented reality devices, its memory footprint and computing cost are the two main factors limiting the performance and the range of applications. In sparse feature based SLAM algorithms, one efficient way for this problem is to limit the map point size by selecting the points potentially useful for local and global bundle adjustment (BA). This study proposes an efficient graph optimization for sparsifying map points in SLAM systems. Specifically, we formulate a maximum pose-visibility and maximum spatial diversity problem as a minimum-cost maximum-flow graph optimization problem. The proposed method works as an additional step in existing SLAM systems, so it can be used in both conventional or learning based SLAM systems. By extensive experimental evaluations we demonstrate the proposed method achieves even more accurate camera poses with approximately 1/3 of the map points and 1/2 of the computation.
Learning to Predict Repeatability of Interest Points
May 08, 2021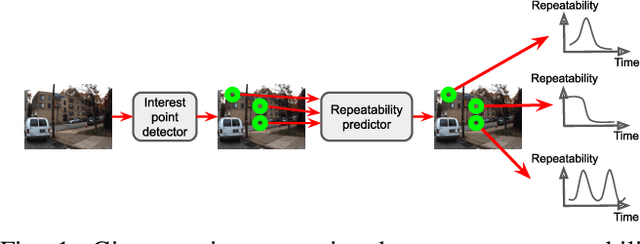
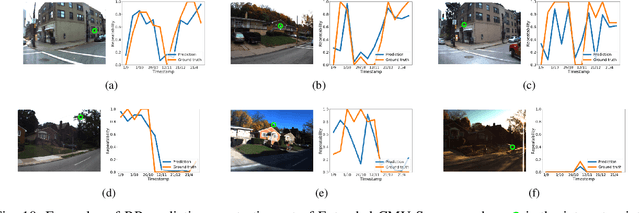
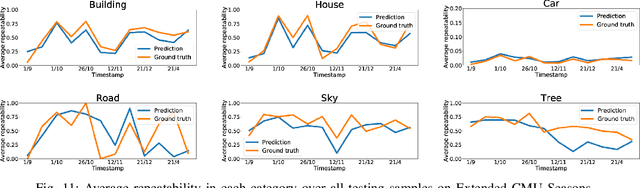
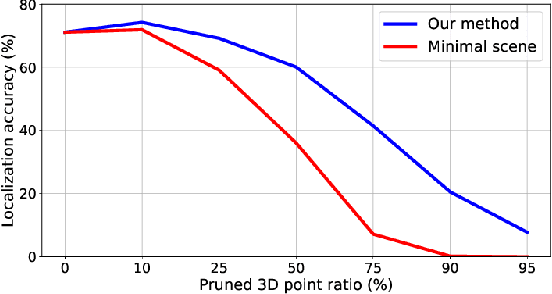
Many robotics applications require interest points that are highly repeatable under varying viewpoints and lighting conditions. However, this requirement is very challenging as the environment changes continuously and indefinitely, leading to appearance changes of interest points with respect to time. This paper proposes to predict the repeatability of an interest point as a function of time, which can tell us the lifespan of the interest point considering daily or seasonal variation. The repeatability predictor (RP) is formulated as a regressor trained on repeated interest points from multiple viewpoints over a long period of time. Through comprehensive experiments, we demonstrate that our RP can estimate when a new interest point is repeated, and also highlight an insightful analysis about this problem. For further comparison, we apply our RP to the map summarization under visual localization framework, which builds a compact representation of the full context map given the query time. The experimental result shows a careful selection of potentially repeatable interest points predicted by our RP can significantly mitigate the degeneration of localization accuracy from map summarization.