 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Evaluation of SGM Variants for Dense Stereo Matching
Nov 22, 2019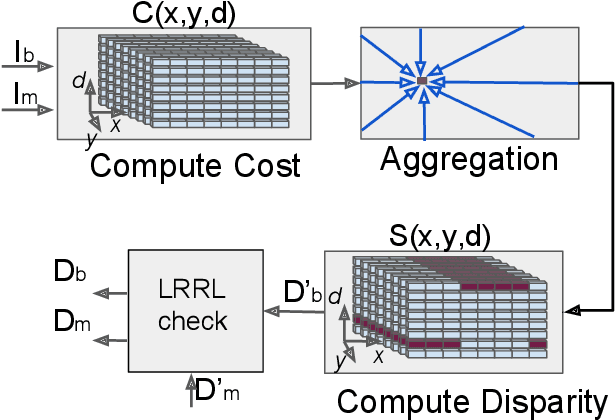
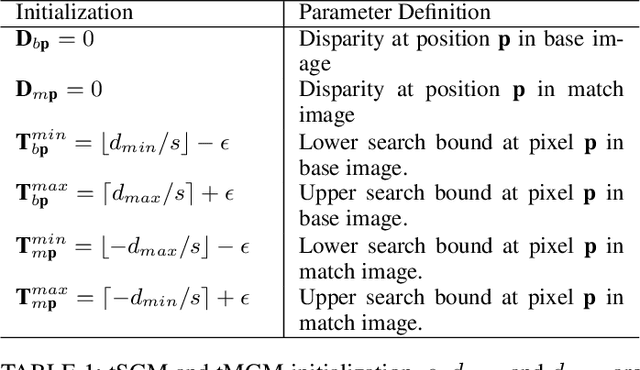
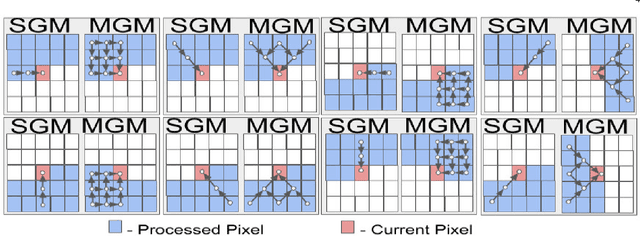
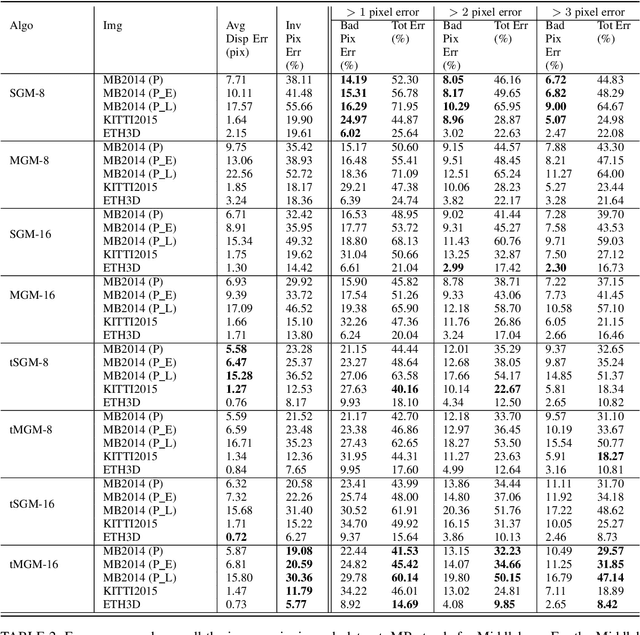
Our goal here is threefold: [1] To present a new dense-stereo matching algorithm, tMGM, that by combining the hierarchical logic of tSGM with the support structure of MGM achieves 6-8\% performance improvement over the baseline SGM (these performance numbers are posted under tMGM-16 in the Middlebury Benchmark V3 ); and [2] Through an exhaustive quantitative and qualitative comparative study, to compare how the major variants of the SGM approach to dense stereo matching, including the new tMGM, perform in the presence of: (a) illumination variations and shadows, (b) untextured or weakly textured regions, (c) repetitive patterns in the scene in the presence of large stereo rectification errors. [3] To present a novel DEM-Sculpting approach for estimating initial disparity search bounds for multi-date satellite stereo pairs. Based on our study, we have found that tMGM generally performs best with respect to all these data conditions. Both tSGM and MGM improve the density of stereo disparity maps and combining the two in tMGM makes it possible to accurately estimate the disparities at a significant number of pixels that would otherwise be declared invalid by SGM. The datasets we have used in our comparative evaluation include the Middlebury2014, KITTI2015, and ETH3D datasets and the satellite images over the San Fernando area from the MVS Challenge dataset.
A New Stereo Benchmarking Dataset for Satellite Images
Jul 09, 2019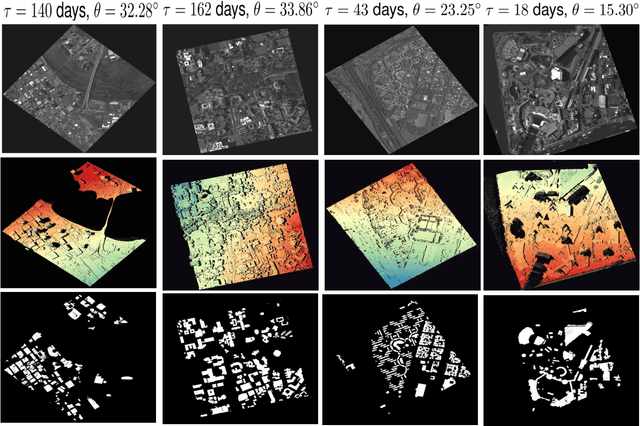
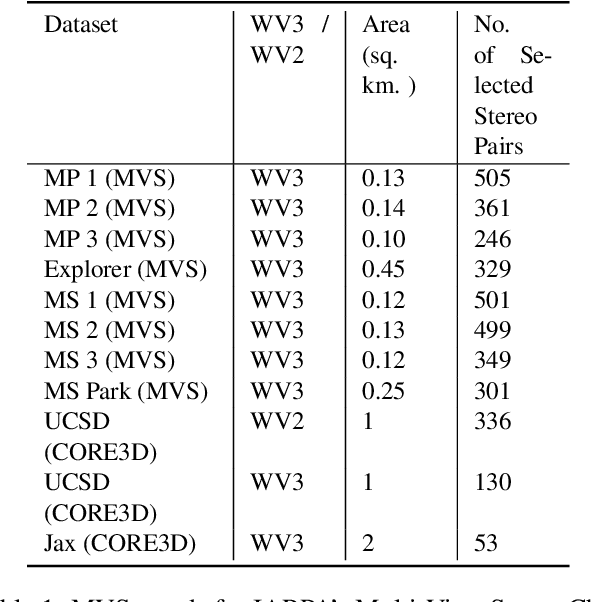
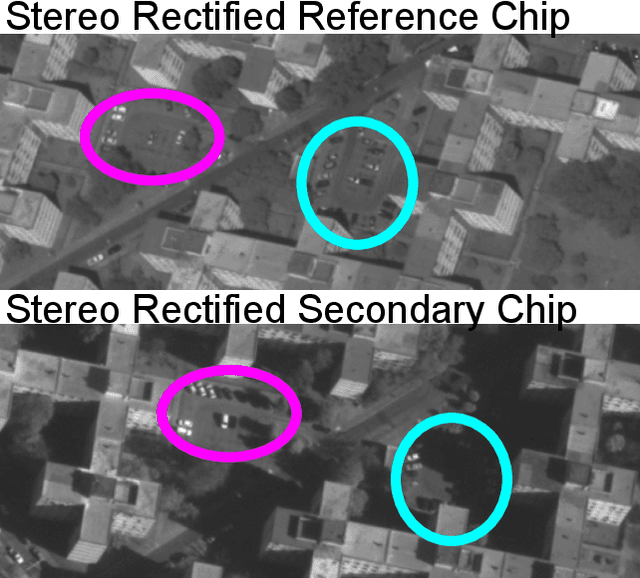
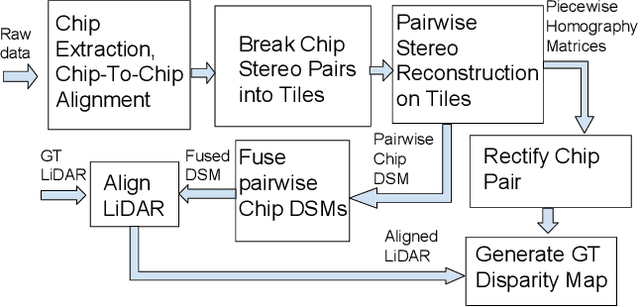
In order to facilitate further research in stereo reconstruction with multi-date satellite images, the goal of this paper is to provide a set of stereo-rectified images and the associated groundtruthed disparities for 10 AOIs (Area of Interest) drawn from two sources: 8 AOIs from IARPA's MVS Challenge dataset and 2 AOIs from the CORE3D-Public dataset. The disparities were groundtruthed by first constructing a fused DSM from the stereo pairs and by aligning 30 cm LiDAR with the fused DSM. Unlike the existing benckmarking datasets, we have also carried out a quantitative evaluation of our groundtruthed disparities using human annotated points in two of the AOIs. Additionally, the rectification accuracy in our dataset is comparable to the same in the existing state-of-the-art stereo datasets. In general, we have used the WorldView-3 (WV3) images for the dataset, the exception being the UCSD area for which we have used both WV3 and WorldView-2 (WV2) images. All of the dataset images are now in the public domain. Since multi-date satellite images frequently include images acquired in different seasons (which creates challenges in finding corresponding pairs of pixels for stereo), our dataset also includes for each image a building mask over which the disparities estimated by stereo should prove reliable. Additional metadata included in the dataset includes information about each image's acquisition date and time, the azimuth and elevation angles of the camera, and the intersection angles for the two views in a stereo pair. Also included in the dataset are both quantitative and qualitative analyses of the accuracy of the groundtruthed disparity maps. Our dataset is available for download at \url{https://engineering.purdue.edu/RVL/Database/SatStereo/index.html}