 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Large Language Models with Multimodal Virtual Reality Interfaces to Support Collaborative Human-Robot Construction Work
Apr 04, 2024In the construction industry, where work environments are complex, unstructured and often dangerous, the implementation of Human-Robot Collaboration (HRC) is emerging as a promising advancement. This underlines the critical need for intuitive communication interfaces that enable construction workers to collaborate seamlessly with robotic assistants. This study introduces a conversational Virtual Reality (VR) interface integrating multimodal interaction to enhance intuitive communication between construction workers and robots. By integrating voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM), the proposed system enables intuitive and precise interaction within a VR setting. Evaluated by twelve construction workers through a drywall installation case study, the proposed system demonstrated its low workload and high usability with succinct command inputs. The proposed multimodal interaction system suggests that such technological integration can substantially advance the integration of robotic assistants in the construction industry.
Natural Language Instructions for Intuitive Human Interaction with Robotic Assistants in Field Construction Work
Jul 11, 2023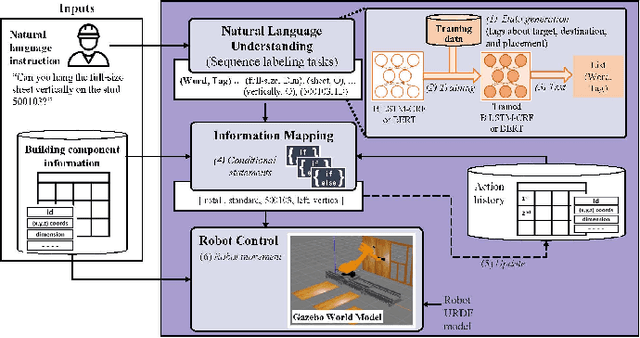
The introduction of robots is widely considered to have significant potential of alleviating the issues of worker shortage and stagnant productivity that afflict the construction industry. However, it is challenging to use fully automated robots in complex and unstructured construction sites. Human-Robot Collaboration (HRC) has shown promise of combining human workers' flexibility and robot assistants' physical abilities to jointly address the uncertainties inherent in construction work. When introducing HRC in construction, it is critical to recognize the importance of teamwork and supervision in field construction and establish a natural and intuitive communication system for the human workers and robotic assistants. Natural language-based interaction can enable intuitive and familiar communication with robots for human workers who are non-experts in robot programming. However, limited research has been conducted on this topic in construction. This paper proposes a framework to allow human workers to interact with construction robots based on natural language instructions. The proposed method consists of three stages: Natural Language Understanding (NLU), Information Mapping (IM), and Robot Control (RC). Natural language instructions are input to a language model to predict a tag for each word in the NLU module. The IM module uses the result of the NLU module and building component information to generate the final instructional output essential for a robot to acknowledge and perform the construction task. A case study for drywall installation is conducted to evaluate the proposed approach. The obtained results highlight the potential of using natural language-based interaction to replicate the communication that occurs between human workers within the context of human-robot teams.
Data Augmentation Using Adversarial Training for Construction-Equipment Classification
Nov 27, 2019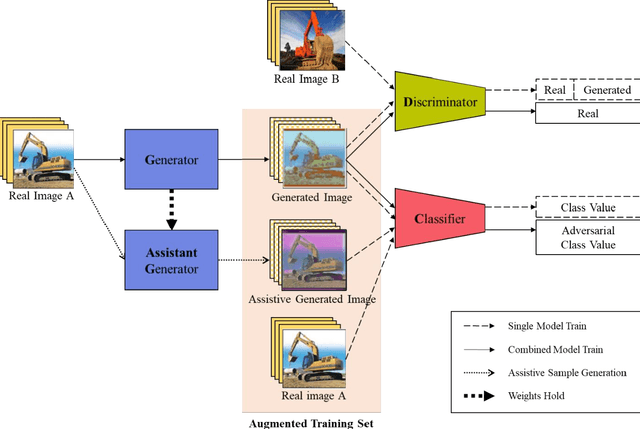


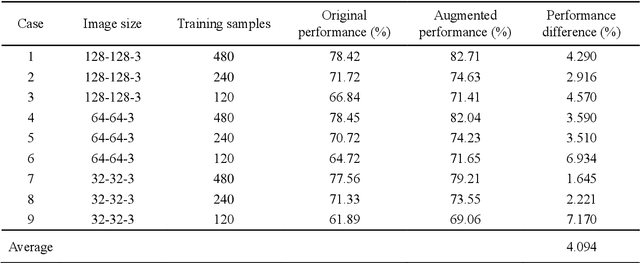
Deep learning-based construction-site image analysis has recently made great progress with regard to accuracy and speed, but it requires a large amount of data. Acquiring sufficient amount of labeled construction-image data is a prerequisite for deep learning-based construction-image recognition and requires considerable time and effort. In this paper, we propose a "data augmentation" scheme based on generative adversarial networks (GANs) for construction-equipment classification. The proposed method combines a GAN and additional "adversarial training" to stably perform "data augmentation" for construction equipment. The "data augmentation" was verified via binary classification experiments involving excavator images, and the average accuracy improvement was 4.094%. In the experiment, three image sizes (32-32-3, 64-64-3, and 128-128-3) and 120, 240, and 480 training samples were used to demonstrate the robustness of the proposed method. These results demonstrated that the proposed method can effectively and reliably generate construction-equipment images and train deep learning-based classifiers for construction equipment.