 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Opportunistic Routing in Software-Defined LEO-Terrestrial Systems
Jan 20, 2026The proliferation of large-scale low Earth orbit (LEO) satellite constellations is driving the need for intelligent routing strategies that can effectively deliver data to terrestrial networks under rapidly time-varying topologies and intermittent gateway visibility. Leveraging the global control capabilities of a geostationary (GEO)-resident software-defined networking (SDN) controller, we introduce opportunistic routing, which aims to minimize delivery delay by forwarding packets to any currently available ground gateways rather than fixed destinations. This makes it a promising approach for achieving low-latency and robust data delivery in highly dynamic LEO networks. Specifically, we formulate a constrained stochastic optimization problem and employ a residual reinforcement learning framework to optimize opportunistic routing for reducing transmission delay. Simulation results over multiple days of orbital data demonstrate that our method achieves significant improvements in queue length reduction compared to classical backpressure and other well-known queueing algorithms.
Learning Time-Varying Graph Signals via Koopman
Nov 09, 2025A wide variety of real-world data, such as sea measurements, e.g., temperatures collected by distributed sensors and multiple unmanned aerial vehicles (UAV) trajectories, can be naturally represented as graphs, often exhibiting non-Euclidean structures. These graph representations may evolve over time, forming time-varying graphs. Effectively modeling and analyzing such dynamic graph data is critical for tasks like predicting graph evolution and reconstructing missing graph data. In this paper, we propose a framework based on the Koopman autoencoder (KAE) to handle time-varying graph data. Specifically, we assume the existence of a hidden non-linear dynamical system, where the state vector corresponds to the graph embedding of the time-varying graph signals. To capture the evolving graph structures, the graph data is first converted into a vector time series through graph embedding, representing the structural information in a finite-dimensional latent space. In this latent space, the KAE is applied to learn the underlying non-linear dynamics governing the temporal evolution of graph features, enabling both prediction and reconstruction tasks.
Predictive Covert Communication Against Multi-UAV Surveillance Using Graph Koopman Autoencoder
Sep 25, 2024



Low Probability of Detection (LPD) communication aims to obscure the presence of radio frequency (RF) signals to evade surveillance. In the context of mobile surveillance utilizing unmanned aerial vehicles (UAVs), achieving LPD communication presents significant challenges due to the UAVs' rapid and continuous movements, which are characterized by unknown nonlinear dynamics. Therefore, accurately predicting future locations of UAVs is essential for enabling real-time LPD communication. In this paper, we introduce a novel framework termed predictive covert communication, aimed at minimizing detectability in terrestrial ad-hoc networks under multi-UAV surveillance. Our data-driven method synergistically integrates graph neural networks (GNN) with Koopman theory to model the complex interactions within a multi-UAV network and facilitating long-term predictions by linearizing the dynamics, even with limited historical data. Extensive simulation results substantiate that the predicted trajectories using our method result in at least 63%-75% lower probability of detection when compared to well-known state-of-the-art baseline approaches, showing promise in enabling low-latency covert operations in practical scenarios.
Koopman AutoEncoder via Singular Value Decomposition for Data-Driven Long-Term Prediction
Aug 21, 2024The Koopman autoencoder, a data-driven technique, has gained traction for modeling nonlinear dynamics using deep learning methods in recent years. Given the linear characteristics inherent to the Koopman operator, controlling its eigenvalues offers an opportunity to enhance long-term prediction performance, a critical task for forecasting future trends in time-series datasets with long-term behaviors. However, controlling eigenvalues is challenging due to high computational complexity and difficulties in managing them during the training process. To tackle this issue, we propose leveraging the singular value decomposition (SVD) of the Koopman matrix to adjust the singular values for better long-term prediction. Experimental results demonstrate that, during training, the loss term for singular values effectively brings the eigenvalues close to the unit circle, and the proposed approach outperforms existing baseline methods for long-term prediction tasks.
Energy-Efficient UAV-Assisted IoT Data Collection via TSP-Based Solution Space Reduction
Jun 02, 2023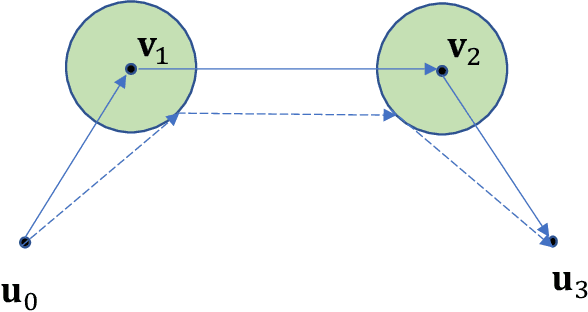
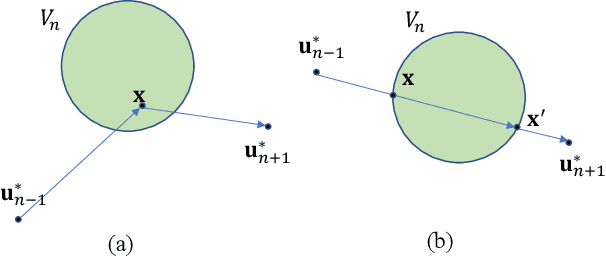
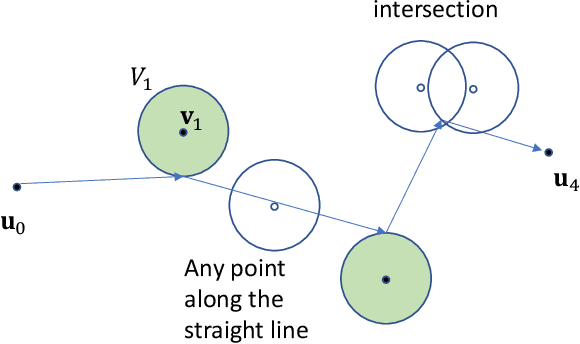
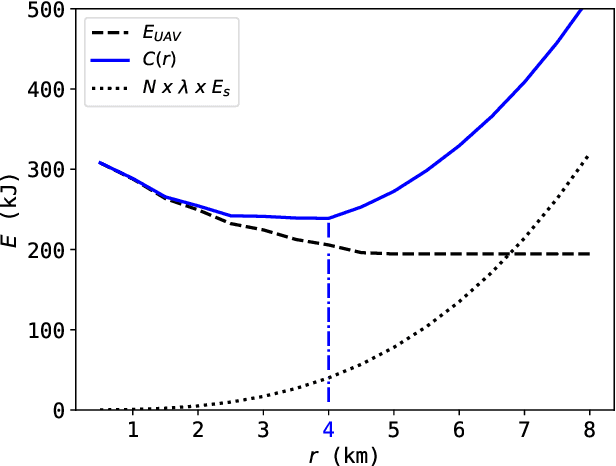
This paper presents a wireless data collection framework that employs an unmanned aerial vehicle (UAV) to efficiently gather data from distributed IoT sensors deployed in a large area. Our approach takes into account the non-zero communication ranges of the sensors to optimize the flight path of the UAV, resulting in a variation of the Traveling Salesman Problem (TSP). We prove mathematically that the optimal waypoints for this TSP-variant problem are restricted to the boundaries of the sensor communication ranges, greatly reducing the solution space. Building on this finding, we develop a low-complexity UAV-assisted sensor data collection algorithm, and demonstrate its effectiveness in a selected use case where we minimize the total energy consumption of the UAV and sensors by jointly optimizing the UAV's travel distance and the sensors' communication ranges.
Federated Graph Learning for Low Probability of Detection in Wireless Ad-Hoc Networks
Jun 01, 2023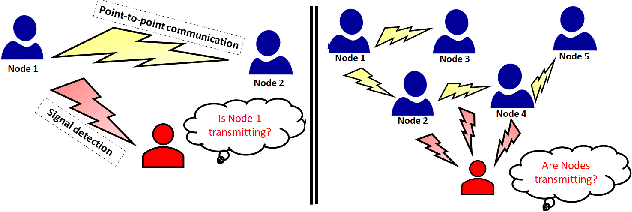
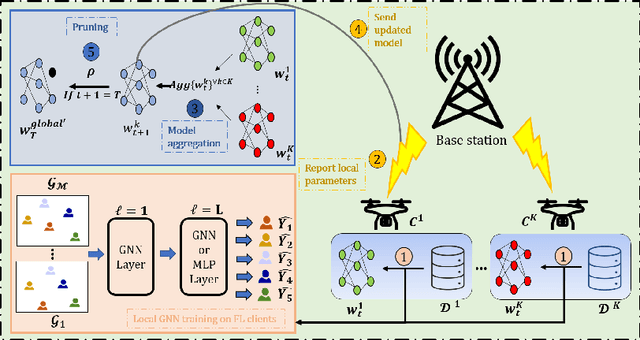
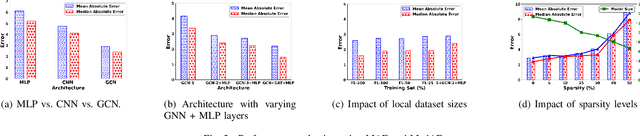
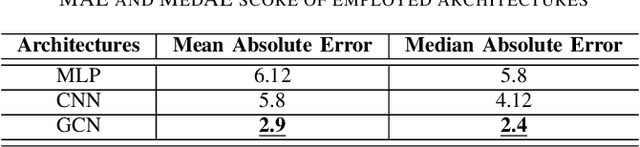
Low probability of detection (LPD) has recently emerged as a means to enhance the privacy and security of wireless networks. Unlike existing wireless security techniques, LPD measures aim to conceal the entire existence of wireless communication instead of safeguarding the information transmitted from users. Motivated by LPD communication, in this paper, we study a privacy-preserving and distributed framework based on graph neural networks to minimise the detectability of a wireless ad-hoc network as a whole and predict an optimal communication region for each node in the wireless network, allowing them to communicate while remaining undetected from external actors. We also demonstrate the effectiveness of the proposed method in terms of two performance measures, i.e., mean absolute error and median absolute error.