 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Optimization Modeling through Expert-Guided Large Language Model Reasoning
Aug 20, 2025Optimization Modeling (OM) is essential for solving complex decision-making problems. However, the process remains time-consuming and error-prone, heavily relying on domain experts. While Large Language Models (LLMs) show promise in addressing these challenges through their natural language understanding and reasoning capabilities, current approaches face three critical limitations: high benchmark labeling error rates reaching up to 42\%, narrow evaluation scope that only considers optimal values, and computational inefficiency due to heavy reliance on multi-agent systems or model fine-tuning. In this work, we first enhance existing datasets through systematic error correction and more comprehensive annotation. Additionally, we introduce LogiOR, a new optimization modeling benchmark from the logistics domain, containing more complex problems with standardized annotations. Furthermore, we present ORThought, a novel framework that leverages expert-level optimization modeling principles through chain-of-thought reasoning to automate the OM process. Through extensive empirical evaluation, we demonstrate that ORThought outperforms existing approaches, including multi-agent frameworks, with particularly significant advantages on complex optimization problems. Finally, we provide a systematic analysis of our method, identifying critical success factors and failure modes, providing valuable insights for future research on LLM-based optimization modeling.
Network-wide Freeway Traffic Estimation Using Sparse Sensor Data: A Dirichlet Graph Auto-Encoder Approach
Mar 20, 2025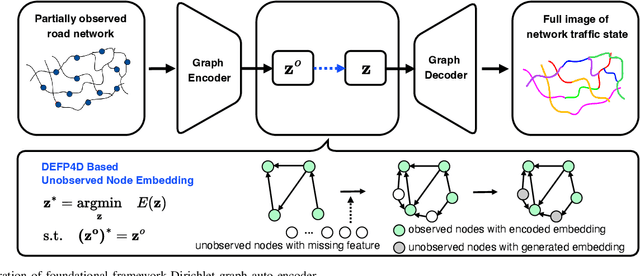
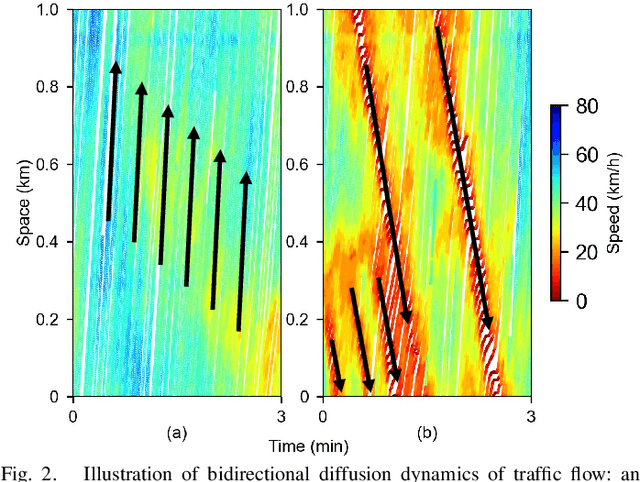
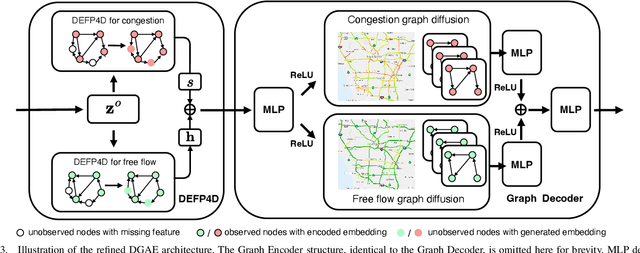
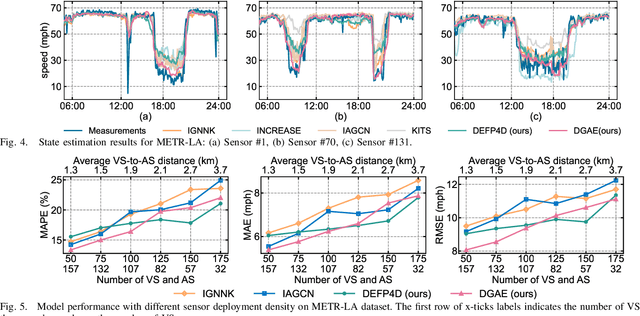
Network-wide Traffic State Estimation (TSE), which aims to infer a complete image of network traffic states with sparsely deployed sensors, plays a vital role in intelligent transportation systems. With the development of data-driven methods, traffic dynamics modeling has advanced significantly. However, TSE poses fundamental challenges for data-driven approaches, since historical patterns cannot be learned locally at sensor-free segments. Although inductive graph learning shows promise in estimating states at locations without sensor, existing methods typically handle unobserved locations by filling them with zeros, introducing bias to the sensitive graph message propagation. The recently proposed Dirichlet Energy-based Feature Propagation (DEFP) method achieves State-Of-The-Art (SOTA) performance in unobserved node classification by eliminating the need for zero-filling. However, applying it to TSE faces three key challenges: inability to handle directed traffic networks, strong assumptions in traffic spatial correlation modeling, and overlooks distinct propagation rules of different patterns (e.g., congestion and free flow). We propose DGAE, a novel inductive graph representation model that addresses these challenges through theoretically derived DEFP for Directed graph (DEFP4D), enhanced spatial representation learning via DEFP4D-guided latent space encoding, and physics-guided propagation mechanisms that separately handles congested and free-flow patterns. Experiments on three traffic datasets demonstrate that DGAE outperforms existing SOTA methods and exhibits strong cross-city transferability. Furthermore, DEFP4D can serve as a standalone lightweight solution, showing superior performance under extremely sparse sensor conditions.
MoGERNN: An Inductive Traffic Predictor for Unobserved Locations in Dynamic Sensing Networks
Jan 21, 2025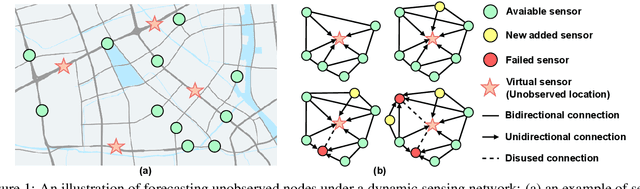

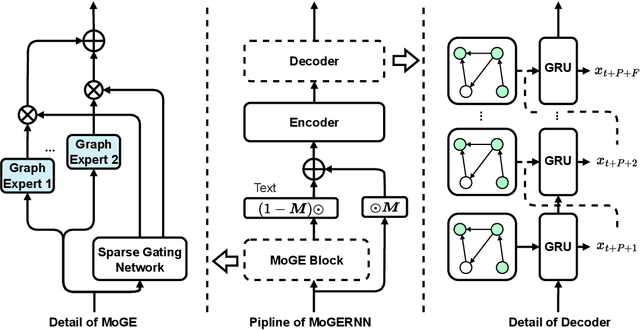
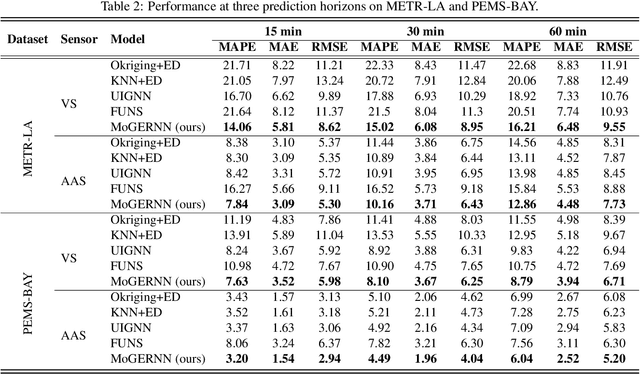
Given a partially observed road network, how can we predict the traffic state of unobserved locations? While deep learning approaches show exceptional performance in traffic prediction, most assume sensors at all locations of interest, which is impractical due to financial constraints. Furthermore, these methods typically require costly retraining when sensor configurations change. We propose MoGERNN, an inductive spatio-temporal graph representation model, to address these challenges. Inspired by the Mixture of Experts approach in Large Language Models, we introduce a Mixture of Graph Expert (MoGE) block to model complex spatial dependencies through multiple graph message aggregators and a sparse gating network. This block estimates initial states for unobserved locations, which are then processed by a GRU-based Encoder-Decoder that integrates a graph message aggregator to capture spatio-temporal dependencies and predict future states. Experiments on two real-world datasets show MoGERNN consistently outperforms baseline methods for both observed and unobserved locations. MoGERNN can accurately predict congestion evolution even in areas without sensors, offering valuable information for traffic management. Moreover, MoGERNN is adaptable to dynamic sensing networks, maintaining competitive performance even compared to its retrained counterpart. Tests with different numbers of available sensors confirm its consistent superiority, and ablation studies validate the effectiveness of its key modules.