 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Human-Motion Prediction and Logic-Geometric Programming for Minimal Interference Human-Robot Tasks
Apr 16, 2021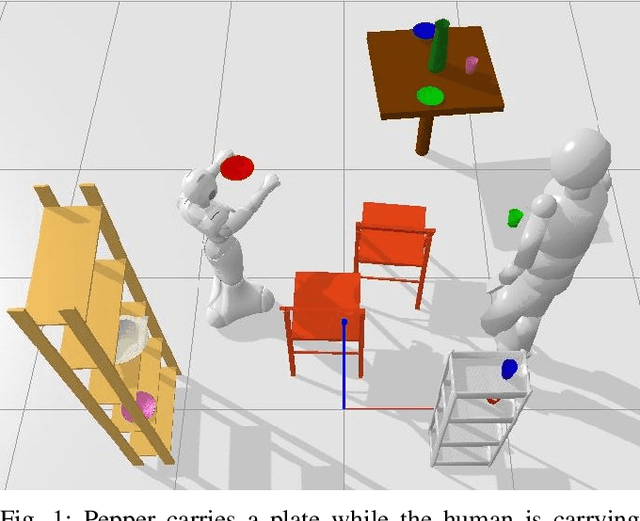
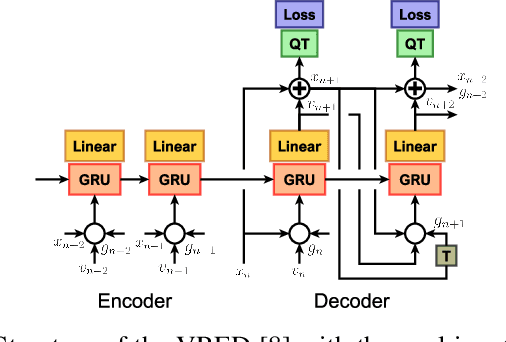


In this paper, we tackle the problem of human-robot coordination in sequences of manipulation tasks. Our approach integrates hierarchical human motion prediction with Task and Motion Planning (TAMP). We first devise a hierarchical motion prediction approach by combining Inverse Reinforcement Learning and short-term motion prediction using a Recurrent Neural Network. In a second step, we propose a dynamic version of the TAMP algorithm Logic- Geometric Programming (LGP). Our version of Dynamic LGP, replans periodically to handle the mismatch between the human motion prediction and the actual human behavior. We assess the efficacy of the approach by training the prediction algorithms and testing the framework on the publicly available MoGaze dataset