 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-centered transparency of grasping via a robot-assisted minimally invasive surgery system
May 15, 2018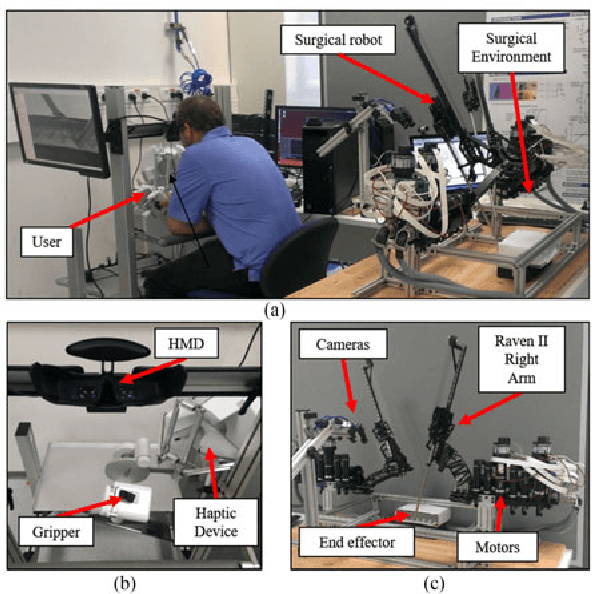

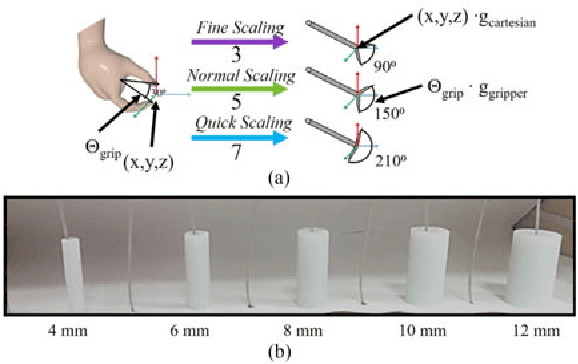
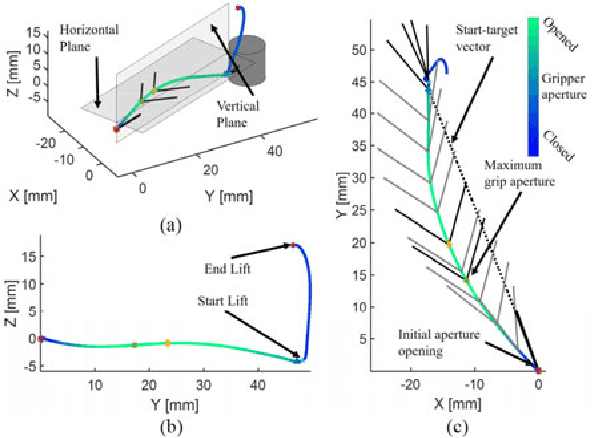
We investigate grasping of rigid objects in unilateral robot-assisted minimally invasive surgery (RAMIS) in this paper. We define a human-centered transparency that quantifies natural action and perception in RAMIS. We demonstrate this human-centered transparency analysis for different values of gripper scaling - the scaling between the grasp aperture of the surgeon-side manipulator and the aperture of the surgical instrument grasper. Thirty-one participants performed teleoperated grasping and perceptual assessment of rigid objects in one of three gripper scaling conditions (fine, normal, and quick, trading off precision and responsiveness). Psychophysical analysis of the variability of maximal grasping aperture during prehension and of the reported size of the object revealed that in normal and quick (but not in the fine) gripper scaling conditions, teleoperated grasping with our system was similar to natural grasping, and therefore, human-centered transparent. We anticipate that using motor control and psychophysics for human-centered optimizing of teleoperation control will eventually improve the usability of RAMIS.
Stochastic Optimal Control for Modeling Reaching Movements in the Presence of Obstacles: Theory and Simulation
Mar 26, 2018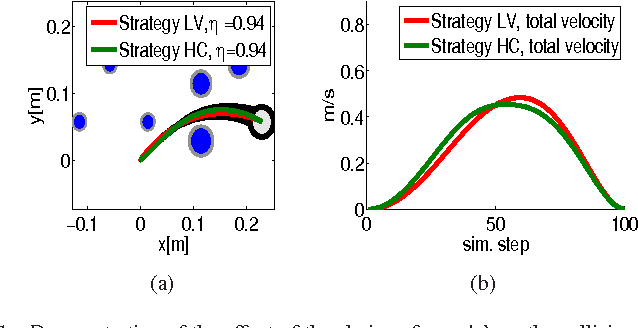
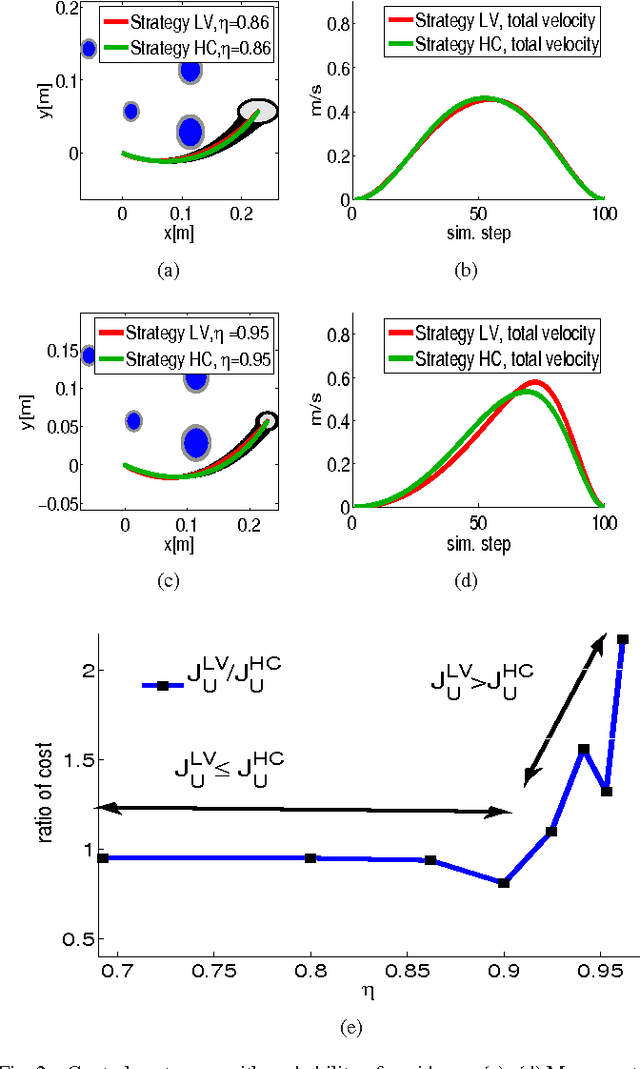
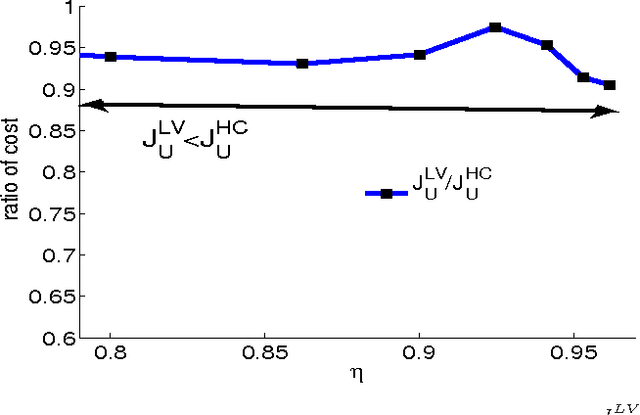
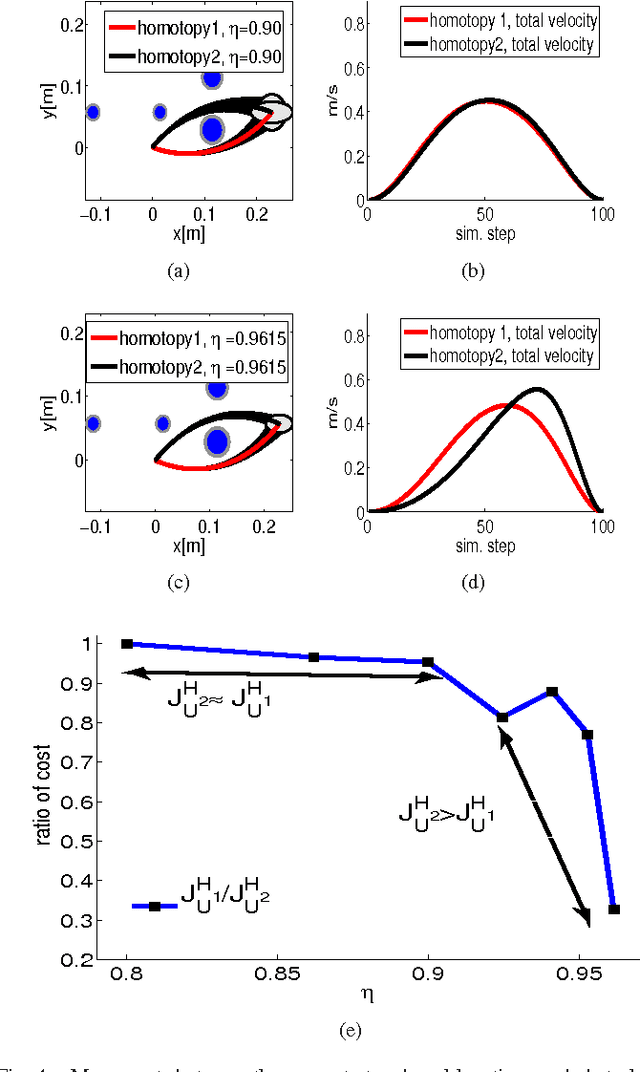
In many human-in-the-loop robotic applications such as robot-assisted surgery and remote teleoperation, predicting the intended motion of the human operator may be useful for successful implementation of shared control, guidance virtual fixtures, and predictive control. Developing computational models of human movements is a critical foundation for such motion prediction frameworks. With this motivation, we present a computational framework for modeling reaching movements in the presence of obstacles. We propose a stochastic optimal control framework that consists of probabilistic collision avoidance constraints and a cost function that trades-off between effort and end-state variance in the presence of a signal-dependent noise. First, we present a series of reformulations to convert the original non-linear and non-convex optimal control into a parametric quadratic programming problem. We show that the parameters can be tuned to model various collision avoidance strategies, thereby capturing the quintessential variability associated with human motion. Then, we present a simulation study that demonstrates the complex interaction between avoidance strategies, control cost, and the probability of collision avoidance. The proposed framework can benefit a variety of applications that require teleoperation in cluttered spaces, including robot-assisted surgery. In addition, it can also be viewed as a new optimizer which produces smooth and probabilistically-safe trajectories under signal dependent noise.