 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-centered transparency of grasping via a robot-assisted minimally invasive surgery system
May 15, 2018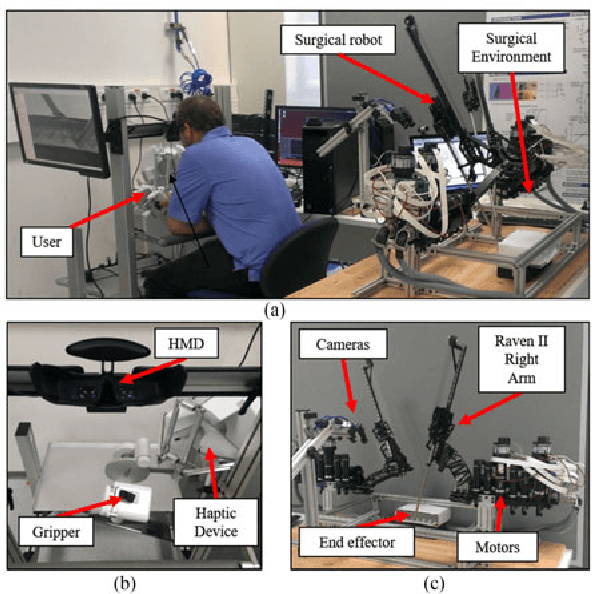

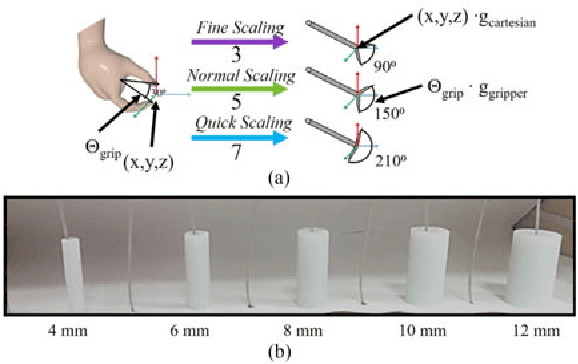
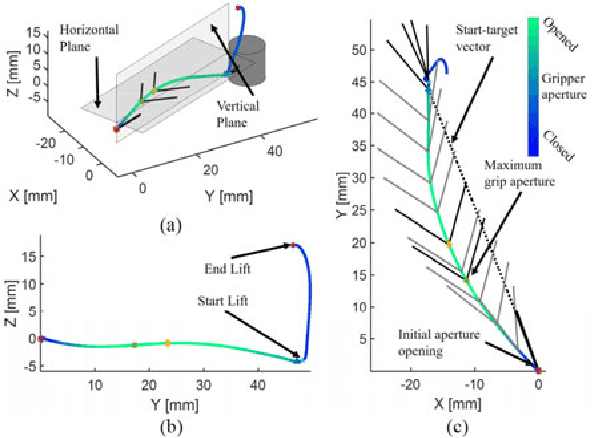
We investigate grasping of rigid objects in unilateral robot-assisted minimally invasive surgery (RAMIS) in this paper. We define a human-centered transparency that quantifies natural action and perception in RAMIS. We demonstrate this human-centered transparency analysis for different values of gripper scaling - the scaling between the grasp aperture of the surgeon-side manipulator and the aperture of the surgical instrument grasper. Thirty-one participants performed teleoperated grasping and perceptual assessment of rigid objects in one of three gripper scaling conditions (fine, normal, and quick, trading off precision and responsiveness). Psychophysical analysis of the variability of maximal grasping aperture during prehension and of the reported size of the object revealed that in normal and quick (but not in the fine) gripper scaling conditions, teleoperated grasping with our system was similar to natural grasping, and therefore, human-centered transparent. We anticipate that using motor control and psychophysics for human-centered optimizing of teleoperation control will eventually improve the usability of RAMIS.