 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMedPAO: A Protocol-Driven Agent for Structuring Medical Reports
Oct 06, 2025The deployment of Large Language Models (LLMs) for structuring clinical data is critically hindered by their tendency to hallucinate facts and their inability to follow domain-specific rules. To address this, we introduce MedPAO, a novel agentic framework that ensures accuracy and verifiable reasoning by grounding its operation in established clinical protocols such as the ABCDEF protocol for CXR analysis. MedPAO decomposes the report structuring task into a transparent process managed by a Plan-Act-Observe (PAO) loop and specialized tools. This protocol-driven method provides a verifiable alternative to opaque, monolithic models. The efficacy of our approach is demonstrated through rigorous evaluation: MedPAO achieves an F1-score of 0.96 on the critical sub-task of concept categorization. Notably, expert radiologists and clinicians rated the final structured outputs with an average score of 4.52 out of 5, indicating a level of reliability that surpasses baseline approaches relying solely on LLM-based foundation models. The code is available at: https://github.com/MiRL-IITM/medpao-agent
* Paper published at "Agentic AI for Medicine" Workshop, MICCAI 2025
Autonomous Control of a Novel Closed Chain Five Bar Active Suspension via Deep Reinforcement Learning
Jun 27, 2024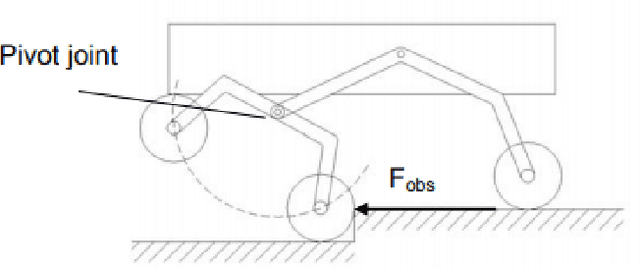
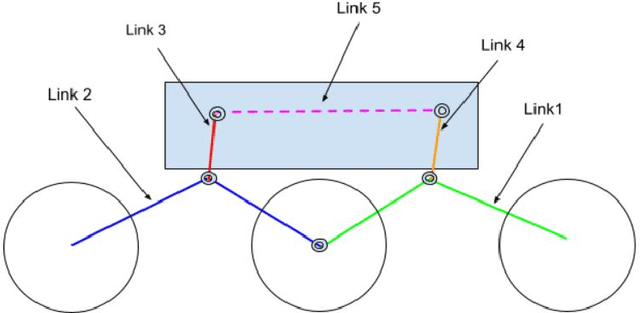
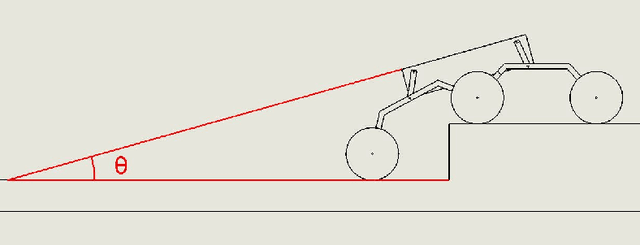

Planetary exploration requires traversal in environments with rugged terrains. In addition, Mars rovers and other planetary exploration robots often carry sensitive scientific experiments and components onboard, which must be protected from mechanical harm. This paper deals with an active suspension system focused on chassis stabilisation and an efficient traversal method while encountering unavoidable obstacles. Soft Actor-Critic (SAC) was applied along with Proportional Integral Derivative (PID) control to stabilise the chassis and traverse large obstacles at low speeds. The model uses the rover's distance from surrounding obstacles, the height of the obstacle, and the chassis' orientation to actuate the control links of the suspension accurately. Simulations carried out in the Gazebo environment are used to validate the proposed active system.
Fast and Accurate Camera Scene Detection on Smartphones
May 17, 2021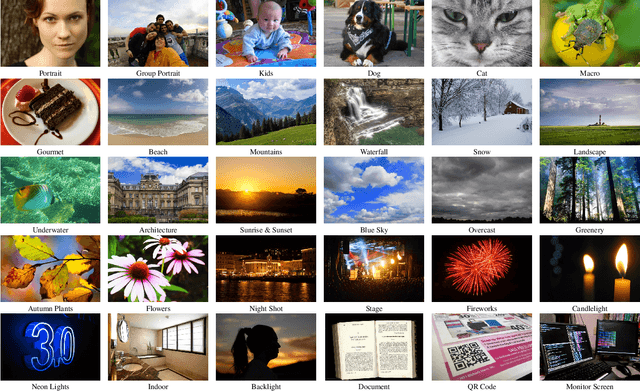
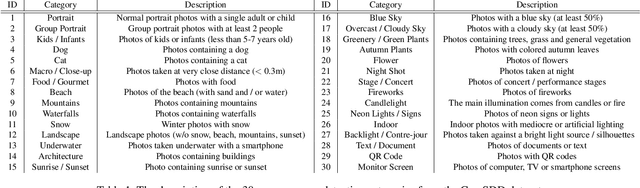

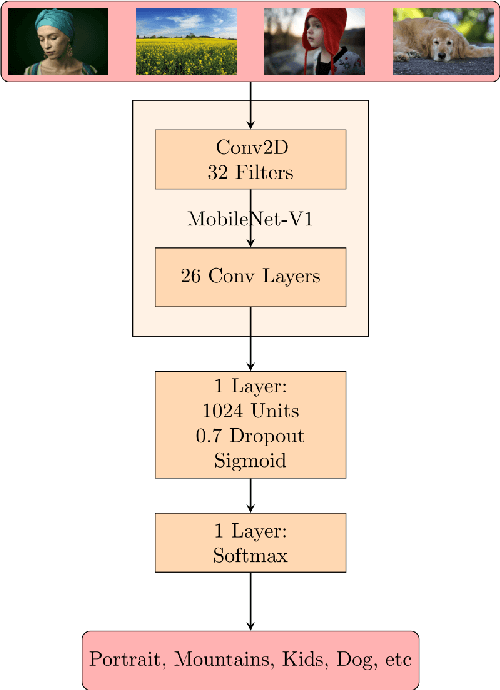
AI-powered automatic camera scene detection mode is nowadays available in nearly any modern smartphone, though the problem of accurate scene prediction has not yet been addressed by the research community. This paper for the first time carefully defines this problem and proposes a novel Camera Scene Detection Dataset (CamSDD) containing more than 11K manually crawled images belonging to 30 different scene categories. We propose an efficient and NPU-friendly CNN model for this task that demonstrates a top-3 accuracy of 99.5% on this dataset and achieves more than 200 FPS on the recent mobile SoCs. An additional in-the-wild evaluation of the obtained solution is performed to analyze its performance and limitation in the real-world scenarios. The dataset and pre-trained models used in this paper are available on the project website.