 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChicGrasp: Imitation-Learning based Customized Dual-Jaw Gripper Control for Delicate, Irregular Bio-products Manipulation
May 13, 2025Automated poultry processing lines still rely on humans to lift slippery, easily bruised carcasses onto a shackle conveyor. Deformability, anatomical variance, and strict hygiene rules make conventional suction and scripted motions unreliable. We present ChicGrasp, an end--to--end hardware--software co-design for this task. An independently actuated dual-jaw pneumatic gripper clamps both chicken legs, while a conditional diffusion-policy controller, trained from only 50 multi--view teleoperation demonstrations (RGB + proprioception), plans 5 DoF end--effector motion, which includes jaw commands in one shot. On individually presented raw broiler carcasses, our system achieves a 40.6\% grasp--and--lift success rate and completes the pick to shackle cycle in 38 s, whereas state--of--the--art implicit behaviour cloning (IBC) and LSTM-GMM baselines fail entirely. All CAD, code, and datasets will be open-source. ChicGrasp shows that imitation learning can bridge the gap between rigid hardware and variable bio--products, offering a reproducible benchmark and a public dataset for researchers in agricultural engineering and robot learning.
Data-Driven Contact-Aware Control Method for Real-Time Deformable Tool Manipulation: A Case Study in the Environmental Swabbing
Mar 27, 2025Deformable Object Manipulation (DOM) remains a critical challenge in robotics due to the complexities of developing suitable model-based control strategies. Deformable Tool Manipulation (DTM) further complicates this task by introducing additional uncertainties between the robot and its environment. While humans effortlessly manipulate deformable tools using touch and experience, robotic systems struggle to maintain stability and precision. To address these challenges, we present a novel State-Adaptive Koopman LQR (SA-KLQR) control framework for real-time deformable tool manipulation, demonstrated through a case study in environmental swab sampling for food safety. This method leverages Koopman operator-based control to linearize nonlinear dynamics while adapting to state-dependent variations in tool deformation and contact forces. A tactile-based feedback system dynamically estimates and regulates the swab tool's angle, contact pressure, and surface coverage, ensuring compliance with food safety standards. Additionally, a sensor-embedded contact pad monitors force distribution to mitigate tool pivoting and deformation, improving stability during dynamic interactions. Experimental results validate the SA-KLQR approach, demonstrating accurate contact angle estimation, robust trajectory tracking, and reliable force regulation. The proposed framework enhances precision, adaptability, and real-time control in deformable tool manipulation, bridging the gap between data-driven learning and optimal control in robotic interaction tasks.
Neural Network Architecture Search Enabled Wide-Deep Learning (NAS-WD) for Spatially Heterogenous Property Awared Chicken Woody Breast Classification and Hardness Regression
Sep 25, 2024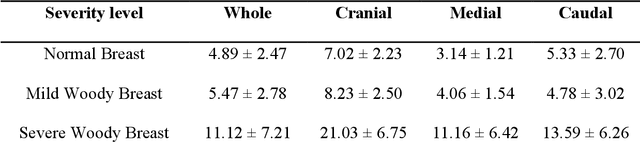
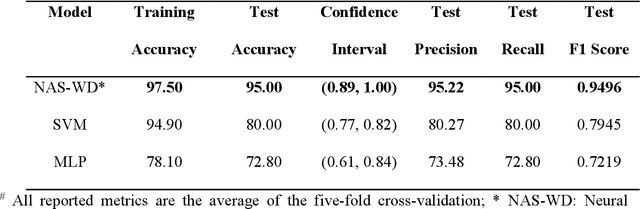
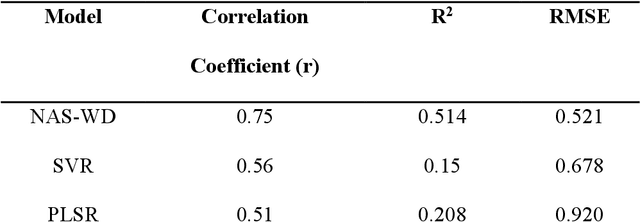
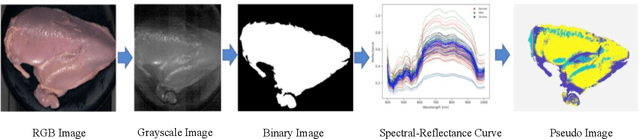
Due to intensive genetic selection for rapid growth rates and high broiler yields in recent years, the global poultry industry has faced a challenging problem in the form of woody breast (WB) conditions. This condition has caused significant economic losses as high as $200 million annually, and the root cause of WB has yet to be identified. Human palpation is the most common method of distinguishing a WB from others. However, this method is time-consuming and subjective. Hyperspectral imaging (HSI) combined with machine learning algorithms can evaluate the WB conditions of fillets in a non-invasive, objective, and high-throughput manner. In this study, 250 raw chicken breast fillet samples (normal, mild, severe) were taken, and spatially heterogeneous hardness distribution was first considered when designing HSI processing models. The study not only classified the WB levels from HSI but also built a regression model to correlate the spectral information with sample hardness data. To achieve a satisfactory classification and regression model, a neural network architecture search (NAS) enabled a wide-deep neural network model named NAS-WD, which was developed. In NAS-WD, NAS was first used to automatically optimize the network architecture and hyperparameters. The classification results show that NAS-WD can classify the three WB levels with an overall accuracy of 95%, outperforming the traditional machine learning model, and the regression correlation between the spectral data and hardness was 0.75, which performs significantly better than traditional regression models.