 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Tracking Robustness with Auxiliary Adversarial Defense Networks
Feb 28, 2024



Adversarial attacks in visual object tracking have significantly degraded the performance of advanced trackers by introducing imperceptible perturbations into images. These attack methods have garnered considerable attention from researchers in recent years. However, there is still a lack of research on designing adversarial defense methods specifically for visual object tracking. To address these issues, we propose an effective additional pre-processing network called DuaLossDef that eliminates adversarial perturbations during the tracking process. DuaLossDef is deployed ahead of the search branche or template branche of the tracker to apply defensive transformations to the input images. Moreover, it can be seamlessly integrated with other visual trackers as a plug-and-play module without requiring any parameter adjustments. We train DuaLossDef using adversarial training, specifically employing Dua-Loss to generate adversarial samples that simultaneously attack the classification and regression branches of the tracker. Extensive experiments conducted on the OTB100, LaSOT, and VOT2018 benchmarks demonstrate that DuaLossDef maintains excellent defense robustness against adversarial attack methods in both adaptive and non-adaptive attack scenarios. Moreover, when transferring the defense network to other trackers, it exhibits reliable transferability. Finally, DuaLossDef achieves a processing time of up to 5ms/frame, allowing seamless integration with existing high-speed trackers without introducing significant computational overhead. We will make our code publicly available soon.
A Structural Correlation Filter Combined with A Multi-task Gaussian Particle Filter for Visual Tracking
Mar 03, 2018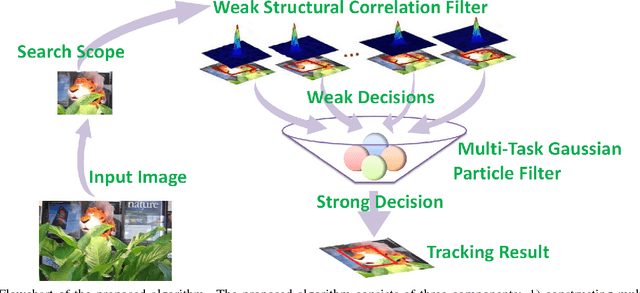
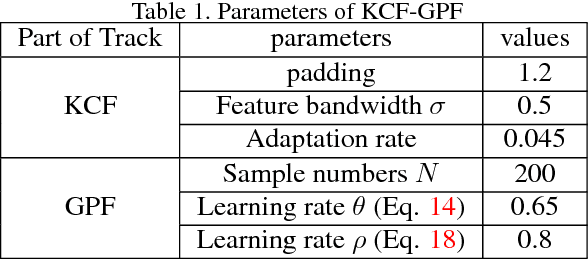
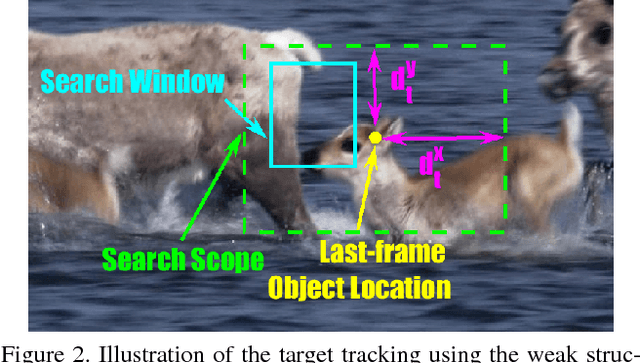

In this paper, we propose a novel structural correlation filter combined with a multi-task Gaussian particle filter (KCF-GPF) model for robust visual tracking. We first present an assemble structure where several KCF trackers as weak experts provide a preliminary decision for a Gaussian particle filter to make a final decision. The proposed method is designed to exploit and complement the strength of a KCF and a Gaussian particle filter. Compared with the existing tracking methods based on correlation filters or particle filters, the proposed tracker has several advantages. First, it can detect the tracked target in a large-scale search scope via weak KCF trackers and evaluate the reliability of weak trackers\rq decisions for a Gaussian particle filter to make a strong decision, and hence it can tackle fast motions, appearance variations, occlusions and re-detections. Second, it can effectively handle large-scale variations via a Gaussian particle filter. Third, it can be amenable to fully parallel implementation using importance sampling without resampling, thereby it is convenient for VLSI implementation and can lower the computational costs. Extensive experiments on the OTB-2013 dataset containing 50 challenging sequences demonstrate that the proposed algorithm performs favourably against 16 state-of-the-art trackers.