 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrection of Pooling Matrix Mis-specifications in Compressed Sensing Based Group Testing
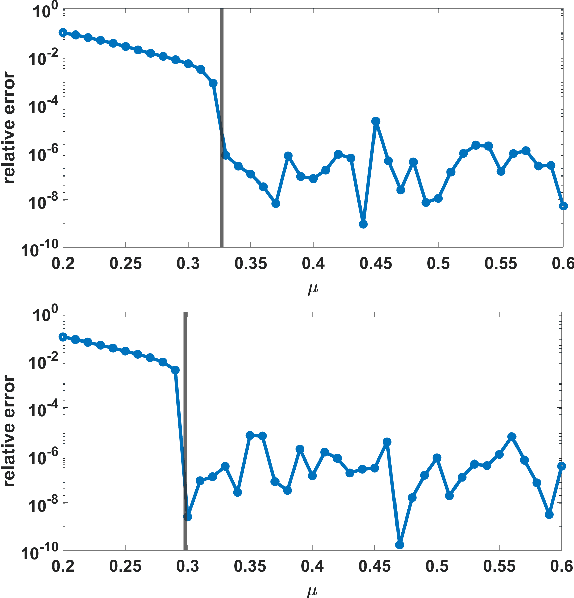
Jan 20, 2026Compressed sensing, which involves the reconstruction of sparse signals from an under-determined linear system, has been recently used to solve problems in group testing. In a public health context, group testing aims to determine the health status values of p subjects from n<<p pooled tests, where a pool is defined as a mixture of small, equal-volume portions of the samples of a subset of subjects. This approach saves on the number of tests administered in pandemics or other resource-constrained scenarios. In practical group testing in time-constrained situations, a technician can inadvertently make a small number of errors during pool preparation, which leads to errors in the pooling matrix, which we term `model mismatch errors' (MMEs). This poses difficulties while determining health status values of the participating subjects from the results on n<<p pooled tests. In this paper, we present an algorithm to correct the MMEs in the pooled tests directly from the pooled results and the available (inaccurate) pooling matrix. Our approach then reconstructs the signal vector from the corrected pooling matrix, in order to determine the health status of the subjects. We further provide theoretical guarantees for the correction of the MMEs and the reconstruction error from the corrected pooling matrix. We also provide several supporting numerical results.
Fast Debiasing of the LASSO Estimator
Feb 27, 2025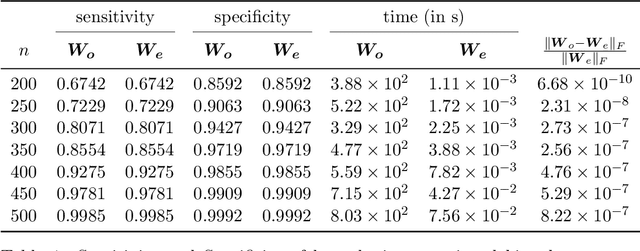
In high-dimensional sparse regression, the \textsc{Lasso} estimator offers excellent theoretical guarantees but is well-known to produce biased estimates. To address this, \cite{Javanmard2014} introduced a method to ``debias" the \textsc{Lasso} estimates for a random sub-Gaussian sensing matrix $\boldsymbol{A}$. Their approach relies on computing an ``approximate inverse" $\boldsymbol{M}$ of the matrix $\boldsymbol{A}^\top \boldsymbol{A}/n$ by solving a convex optimization problem. This matrix $\boldsymbol{M}$ plays a critical role in mitigating bias and allowing for construction of confidence intervals using the debiased \textsc{Lasso} estimates. However the computation of $\boldsymbol{M}$ is expensive in practice as it requires iterative optimization. In the presented work, we re-parameterize the optimization problem to compute a ``debiasing matrix" $\boldsymbol{W} := \boldsymbol{AM}^{\top}$ directly, rather than the approximate inverse $\boldsymbol{M}$. This reformulation retains the theoretical guarantees of the debiased \textsc{Lasso} estimates, as they depend on the \emph{product} $\boldsymbol{AM}^{\top}$ rather than on $\boldsymbol{M}$ alone. Notably, we provide a simple, computationally efficient, closed-form solution for $\boldsymbol{W}$ under similar conditions for the sensing matrix $\boldsymbol{A}$ used in the original debiasing formulation, with an additional condition that the elements of every row of $\boldsymbol{A}$ have uncorrelated entries. Also, the optimization problem based on $\boldsymbol{W}$ guarantees a unique optimal solution, unlike the original formulation based on $\boldsymbol{M}$. We verify our main result with numerical simulations.
Robust Non-adaptive Group Testing under Errors in Group Membership Specifications
Sep 09, 2024
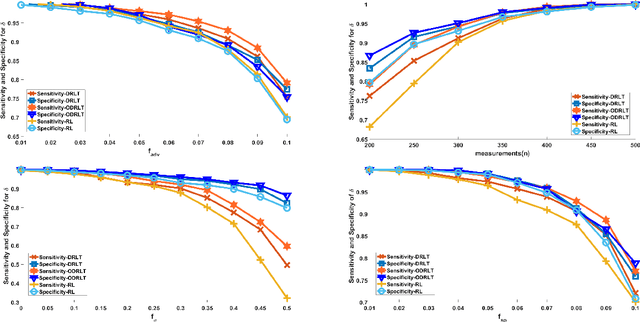
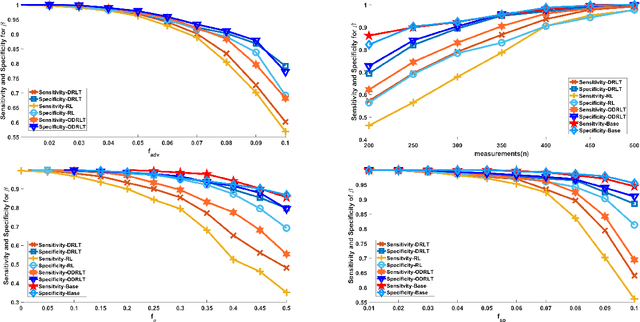
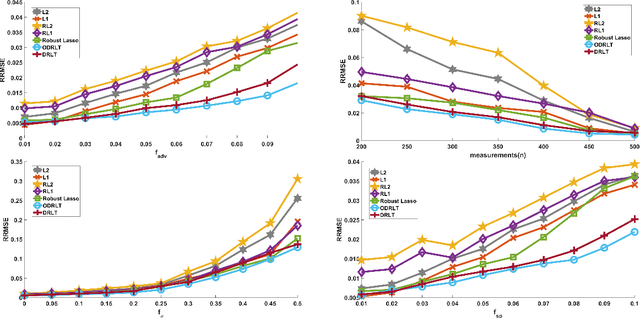
Given $p$ samples, each of which may or may not be defective, group testing (GT) aims to determine their defect status by performing tests on $n < p$ `groups', where a group is formed by mixing a subset of the $p$ samples. Assuming that the number of defective samples is very small compared to $p$, GT algorithms have provided excellent recovery of the status of all $p$ samples with even a small number of groups. Most existing methods, however, assume that the group memberships are accurately specified. This assumption may not always be true in all applications, due to various resource constraints. Such errors could occur, eg, when a technician, preparing the groups in a laboratory, unknowingly mixes together an incorrect subset of samples as compared to what was specified. We develop a new GT method, the Debiased Robust Lasso Test Method (DRLT), that handles such group membership specification errors. The proposed DRLT method is based on an approach to debias, or reduce the inherent bias in, estimates produced by Lasso, a popular and effective sparse regression technique. We also provide theoretical upper bounds on the reconstruction error produced by our estimator. Our approach is then combined with two carefully designed hypothesis tests respectively for (i) the identification of defective samples in the presence of errors in group membership specifications, and (ii) the identification of groups with erroneous membership specifications. The DRLT approach extends the literature on bias mitigation of statistical estimators such as the LASSO, to handle the important case when some of the measurements contain outliers, due to factors such as group membership specification errors. We present numerical results which show that our approach outperforms several baselines and robust regression techniques for identification of defective samples as well as erroneously specified groups.
Reconstruction of Sparse Signals under Gaussian Noise and Saturation
Feb 08, 2021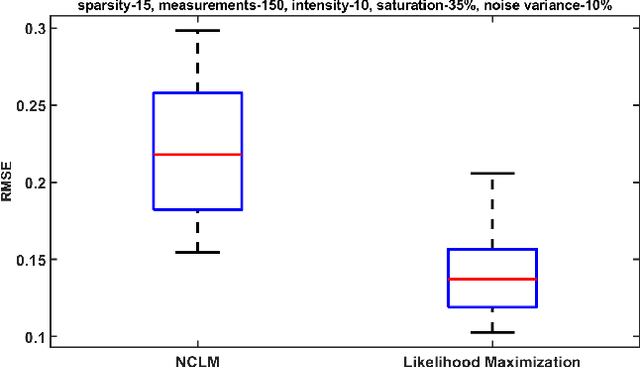
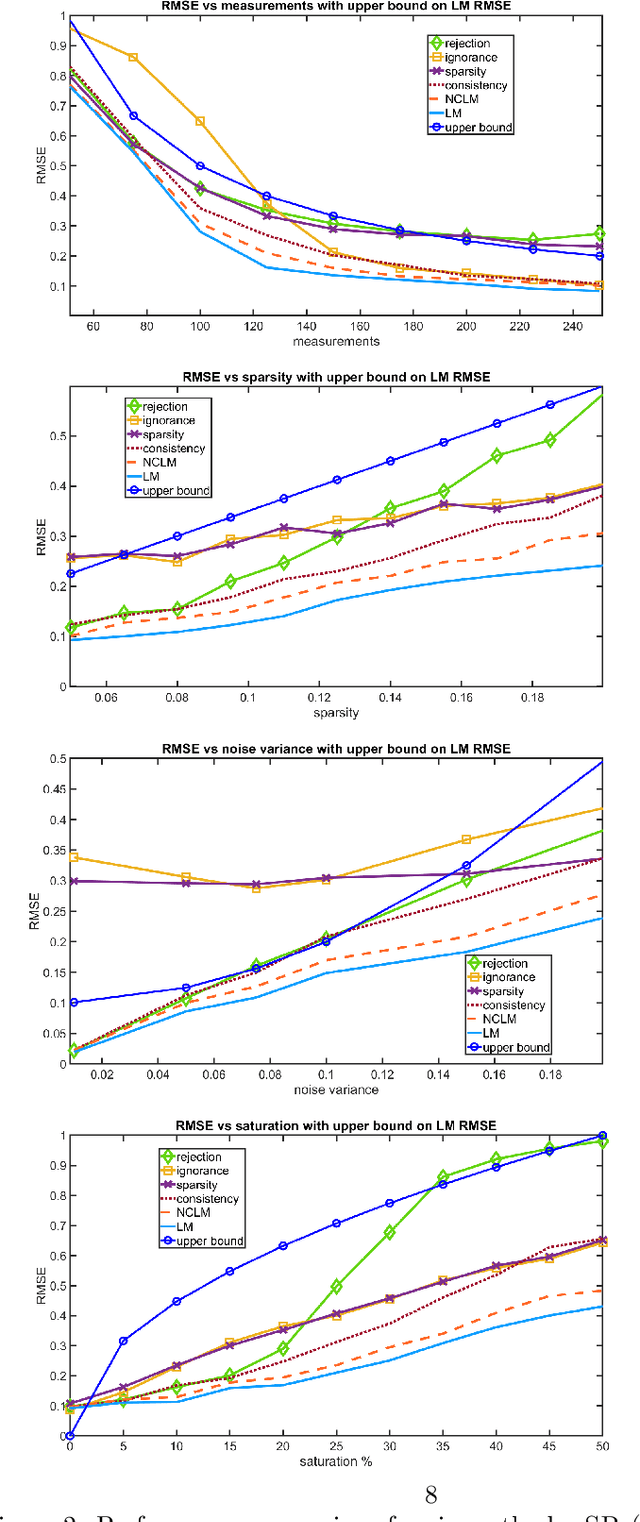
Most compressed sensing algorithms do not account for the effect of saturation in noisy compressed measurements, though saturation is an important consequence of the limited dynamic range of existing sensors. The few algorithms that handle saturation effects either simply discard saturated measurements, or impose additional constraints to ensure consistency of the estimated signal with the saturated measurements (based on a known saturation threshold) given uniform-bounded noise. In this paper, we instead propose a new data fidelity function which is directly based on ensuring a certain form of consistency between the signal and the saturated measurements, and can be expressed as the negative logarithm of a certain carefully designed likelihood function. Our estimator works even in the case of Gaussian noise (which is unbounded) in the measurements. We prove that our data fidelity function is convex. We moreover, show that it satisfies the condition of Restricted Strong Convexity and thereby derive an upper bound on the performance of the estimator. We also show that our technique experimentally yields results superior to the state of the art under a wide variety of experimental settings, for compressive signal recovery from noisy and saturated measurements.