 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWHERE-Bot: a Wheel-less Helical-ring Everting Robot Capable of Omnidirectional Locomotion
Mar 10, 2025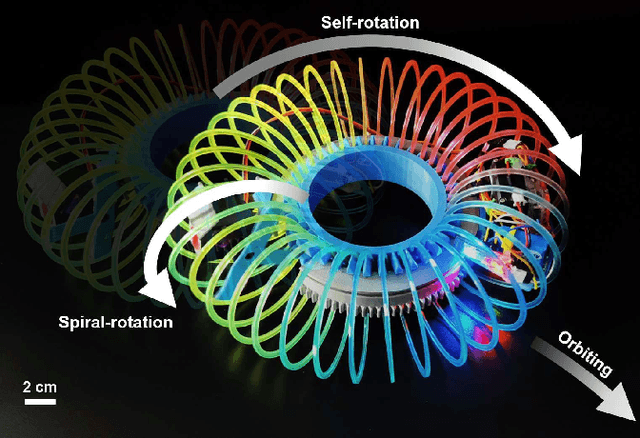
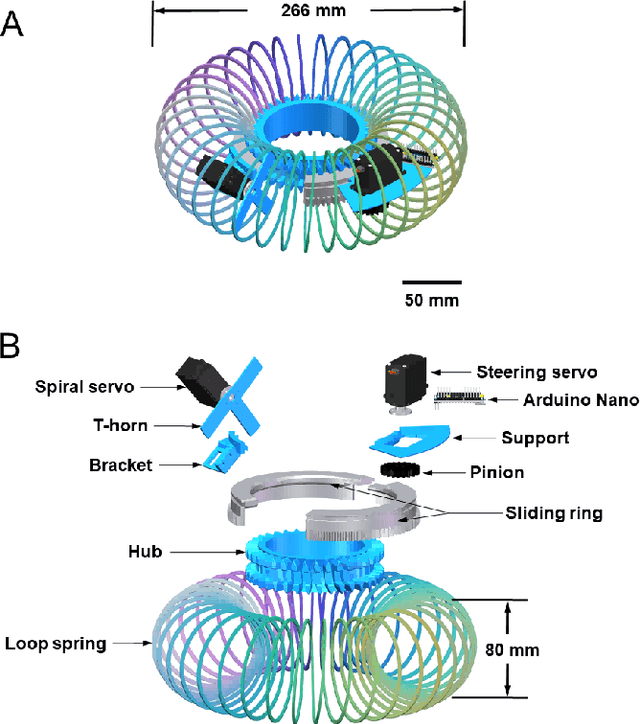
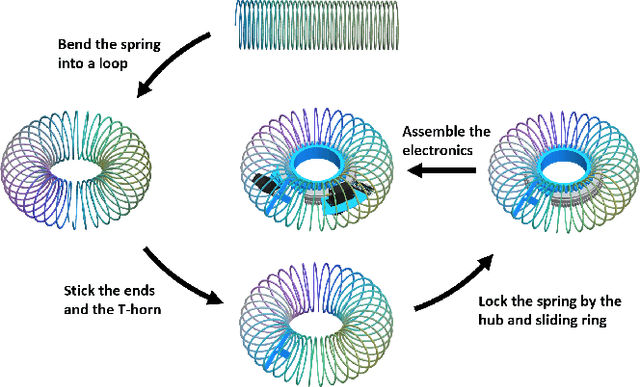
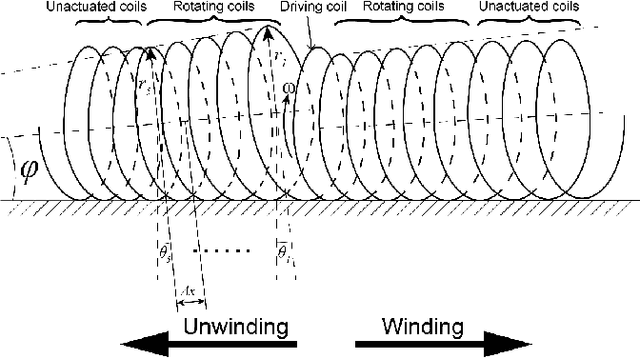
Compared to conventional wheeled transportation systems designed for flat surfaces, soft robots exhibit exceptional adaptability to various terrains, enabling stable movement in complex environments. However, due to the risk of collision with obstacles and barriers, most soft robots rely on sensors for navigation in unstructured environments with uncertain boundaries. In this work, we present the WHERE-Bot, a wheel-less everting soft robot capable of omnidirectional locomotion. Our WHERE-Bot can navigate through unstructured environments by leveraging its structural and motion advantages rather than relying on sensors for boundary detection. By configuring a spring toy ``Slinky'' into a loop shape, the WHERE-Bot performs multiple rotational motions: spiral-rotating along the hub circumference, self-rotating around the hub's center, and orbiting around a certain point. The robot's trajectories can be reprogrammed by actively altering its mass distribution. The WHERE-Bot shows significant potential for boundary exploration in unstructured environments.
A Decapod Robot with Rotary Bellows-Enclosed Soft Transmissions
Mar 10, 2025Soft crawling robots exhibit efficient locomotion across various terrains and demonstrate robustness to diverse environmental conditions. Here, we propose a valveless soft-legged robot that integrates a pair of rotary bellows-enclosed soft transmission systems (R-BESTS). The proposed R-BESTS can directly transmit the servo rotation into leg swing motion. A timing belt controls the pair of R-BESTS to maintain synchronous rotation in opposite phases, realizing alternating tripod gaits of walking and turning. We explored several designs to understand the role of a reinforcement skeleton in twisting the R-BESTS' input bellows units. The bending sequences of the robot legs are controlled through structural design for the output bellows units. Finally, we demonstrate untethered locomotion with the soft robotic decapod. Experimental results show that our robot can walk at 1.75 centimeters per second (0.07 body length per second) for 90 min, turn with a 15-centimeter (0.6 BL) radius, carry a payload of 200 g, and adapt to different terrains.
Design and Fabrication of String-driven Origami Robots
Apr 14, 2024Origami designs and structures have been widely used in many fields, such as morphing structures, robotics, and metamaterials. However, the design and fabrication of origami structures rely on human experiences and skills, which are both time and labor-consuming. In this paper, we present a rapid design and fabrication method for string-driven origami structures and robots. We developed an origami design software to generate desired crease patterns based on analytical models and Evolution Strategies (ES). Additionally, the software can automatically produce 3D models of origami designs. We then used a dual-material 3D printer to fabricate those wrapping-based origami structures with the required mechanical properties. We utilized Twisted String Actuators (TSAs) to fold the target 3D structures from flat plates. To demonstrate the capability of these techniques, we built and tested an origami crawling robot and an origami robotic arm using 3D-printed origami structures driven by TSAs.