 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWHERE-Bot: a Wheel-less Helical-ring Everting Robot Capable of Omnidirectional Locomotion
Mar 10, 2025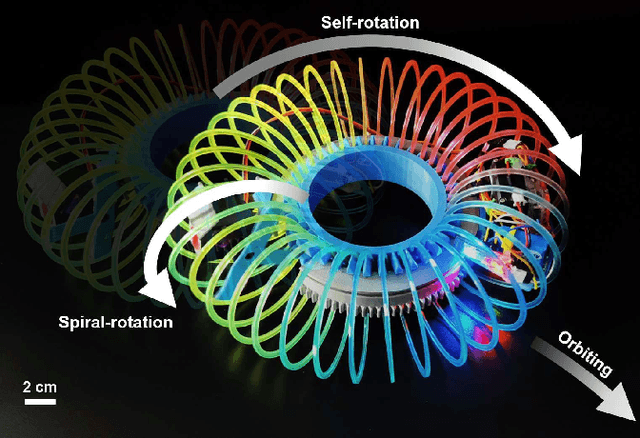
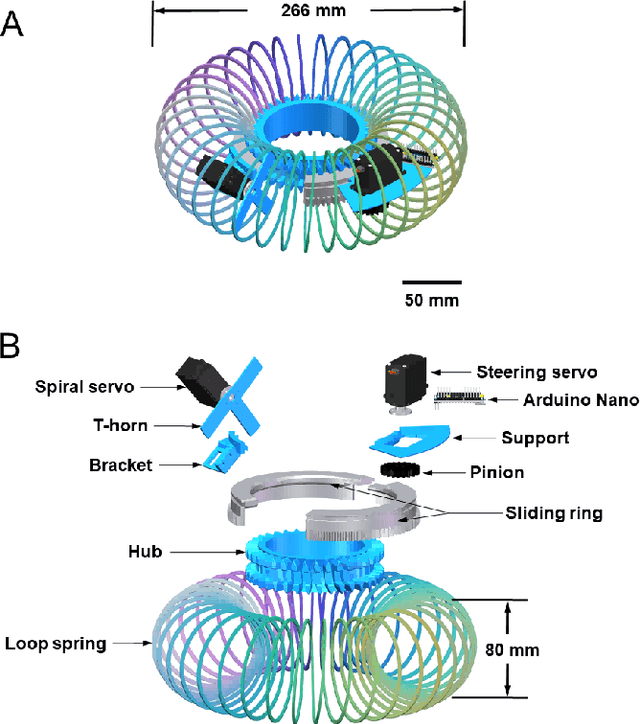
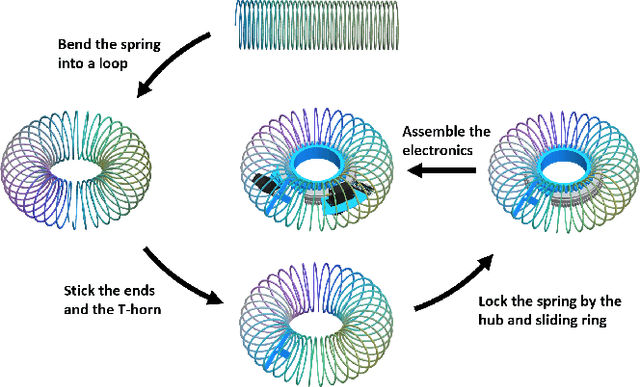
Compared to conventional wheeled transportation systems designed for flat surfaces, soft robots exhibit exceptional adaptability to various terrains, enabling stable movement in complex environments. However, due to the risk of collision with obstacles and barriers, most soft robots rely on sensors for navigation in unstructured environments with uncertain boundaries. In this work, we present the WHERE-Bot, a wheel-less everting soft robot capable of omnidirectional locomotion. Our WHERE-Bot can navigate through unstructured environments by leveraging its structural and motion advantages rather than relying on sensors for boundary detection. By configuring a spring toy ``Slinky'' into a loop shape, the WHERE-Bot performs multiple rotational motions: spiral-rotating along the hub circumference, self-rotating around the hub's center, and orbiting around a certain point. The robot's trajectories can be reprogrammed by actively altering its mass distribution. The WHERE-Bot shows significant potential for boundary exploration in unstructured environments.