 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-enabled Satellite Edge Computing: A Single-Pixel Feature based Shallow Classification Model for Hyperspectral Imaging
Jan 26, 2026As the important component of the Earth observation system, hyperspectral imaging satellites provide high-fidelity and enriched information for the formulation of related policies due to the powerful spectral measurement capabilities. However, the transmission speed of the satellite downlink has become a major bottleneck in certain applications, such as disaster monitoring and emergency mapping, which demand a fast response ability. We propose an efficient AI-enabled Satellite Edge Computing paradigm for hyperspectral image classification, facilitating the satellites to attain autonomous decision-making. To accommodate the resource constraints of satellite platforms, the proposed method adopts a lightweight, non-deep learning framework integrated with a few-shot learning strategy. Moreover, onboard processing on satellites could be faced with sensor failure and scan pattern errors, which result in degraded image quality with bad/misaligned pixels and mixed noise. To address these challenges, we develop a novel two-stage pixel-wise label propagation scheme that utilizes only intrinsic spectral features at the single pixel level without the necessity to consider spatial structural information as requested by deep neural networks. In the first stage, initial pixel labels are obtained by propagating selected anchor labels through the constructed anchor-pixel affinity matrix. Subsequently, a top-k pruned sparse graph is generated by directly computing pixel-level similarities. In the second stage, a closed-form solution derived from the sparse graph is employed to replace iterative computations. Furthermore, we developed a rank constraint-based graph clustering algorithm to determine the anchor labels.
A Radiometric Correction based Optical Modeling Approach to Removing Reflection Noise in TLS Point Clouds of Urban Scenes
Jul 03, 2024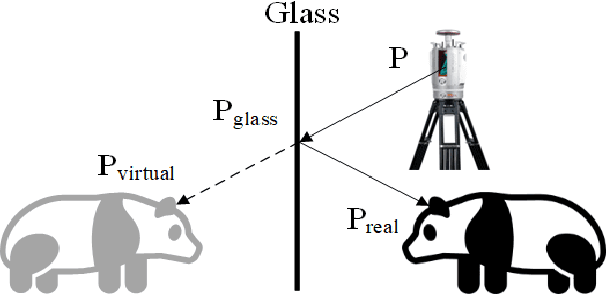
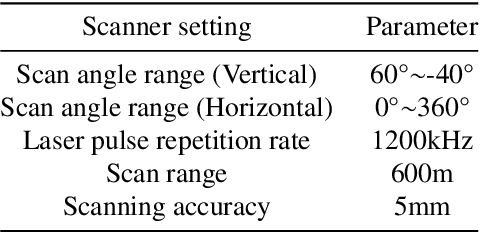
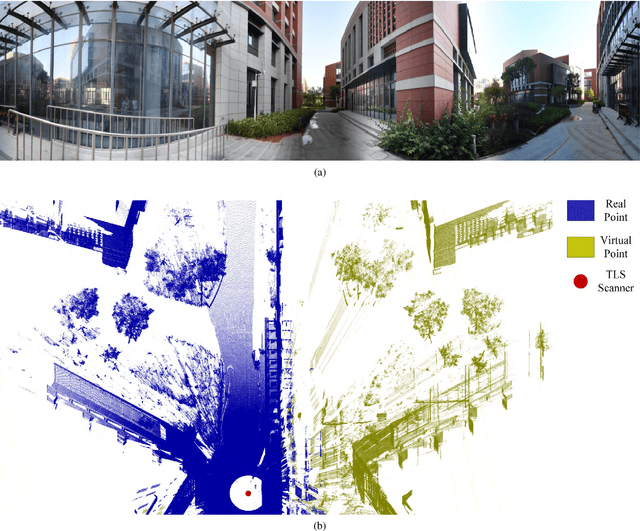
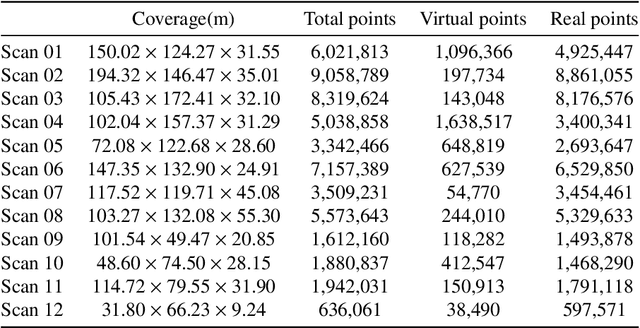
Point clouds are vital in computer vision tasks such as 3D reconstruction, autonomous driving, and robotics. However, TLS-acquired point clouds often contain virtual points from reflective surfaces, causing disruptions. This study presents a reflection noise elimination algorithm for TLS point clouds. Our innovative reflection plane detection algorithm, based on geometry-optical models and physical properties, identifies and categorizes reflection points per optical reflection theory. We've adapted the LSFH feature descriptor to retain reflection features, mitigating interference from symmetrical architectural structures. By incorporating the Hausdorff feature distance, the algorithm enhances resilience to ghosting and deformation, improving virtual point detection accuracy. Extensive experiments on the 3DRN benchmark dataset, featuring diverse urban environments with virtual TLS reflection noise, show our algorithm improves precision and recall rates for 3D points in reflective regions by 57.03\% and 31.80\%, respectively. Our method achieves a 9.17\% better outlier detection rate and 5.65\% higher accuracy than leading methods. Access the 3DRN dataset at (https://github.com/Tsuiky/3DRN).