 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep generative models for unsupervised delamination detection using guided waves
Aug 10, 2023With the rising demands for robust structural health monitoring procedures for aerospace structures, the scope of intelligent algorithms and learning techniques is expanding. Supervised algorithms have shown promising results in the field provided a large, balanced, and labeled amount of data for training. For some applications like aerospace, the data collection process is cumbersome, time-taking, and costly. Also, generating possible damage scenarios in a laboratory setup is challenging because of the complexity of the damage initiation and failure mechanism. Besides this, the uncertainties of the real-time operation restrict the online prediction accuracy with supervised learning. In this paper, deep generative models are proposed for unsupervised delamination prediction as an anomaly detection problem. In this one-class-based model, the deep learning network is trained to learn the distribution of baseline signals. In the testing phase, damage signals and unseen baseline signals are fed into the trained network to predict the state of the structure, i.e., healthy or unhealthy (delamination). It is seen that the proposed method can successfully predict the delamination with high accuracy.
Real-time rapid leakage estimation for deep space habitats using exponentially-weighted adaptively-refined search
Dec 06, 2022



The recent accelerated growth in space-related research and development activities makes the near-term need for long-term extraterrestrial habitats evident. Such habitats must operate under continuous disruptive conditions arising from extreme environments like meteoroid impacts, extreme temperature fluctuations, galactic cosmic rays, destructive dust, and seismic events. Loss of air or atmospheric leakage from a habitat poses safety challenges that demand proper attention. Such leakage may arise from micro-meteoroid impacts, crack growth, bolt/rivet loosening, and seal deterioration. In this paper, leakage estimation in deep space habitats is posed as an inverse problem. A forward pressure-based dynamical model is formulated for atmospheric leakage. Experiments are performed on a small-scaled pressure chamber where different leakage scenarios are emulated and corresponding pressure values are measured. An exponentially-weighted adaptively-refined search (EWARS) algorithm is developed and validated for the inverse problem of real-time leakage estimation. It is demonstrated that the proposed methodology can achieve real-time estimation and tracking of constant and variable leaks with accuracy.
Automated Building Image Extraction from 360-degree Panoramas for Post-Disaster Evaluation
May 04, 2019

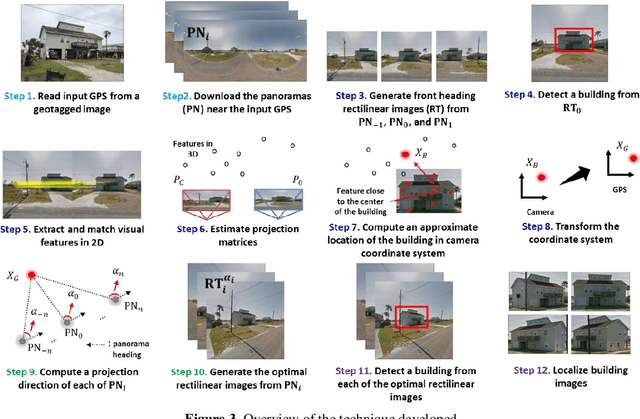
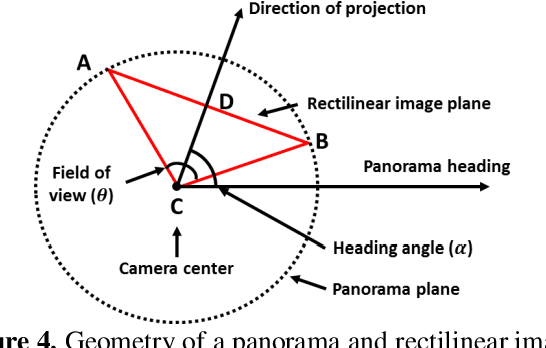
After a disaster, teams of structural engineers collect vast amounts of images from damaged buildings to obtain new knowledge and extract lessons from the event. However, in many cases, the images collected are captured without sufficient spatial context. When damage is severe, it may be quite difficult to even recognize the building. Accessing images of the pre-disaster condition of those buildings is required to accurately identify the cause of the failure or the actual loss in the building. Here, to address this issue, we develop a method to automatically extract pre-event building images from 360o panorama images (panoramas). By providing a geotagged image collected near the target building as the input, panoramas close to the input image location are automatically downloaded through street view services (e.g., Google or Bing in the United States). By computing the geometric relationship between the panoramas and the target building, the most suitable projection direction for each panorama is identified to generate high-quality 2D images of the building. Region-based convolutional neural networks are exploited to recognize the building within those 2D images. Several panoramas are used so that the detected building images provide various viewpoints of the building. To demonstrate the capability of the technique, we consider residential buildings in Holiday Beach, Texas, the United States which experienced significant devastation in Hurricane Harvey in 2017. Using geotagged images gathered during actual post-disaster building reconnaissance missions, we verify the method by successfully extracting residential building images from Google Street View images, which were captured before the event.