 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelecting Optimal Variable Order in Autoregressive Ising Models
Feb 23, 2026Autoregressive models enable tractable sampling from learned probability distributions, but their performance critically depends on the variable ordering used in the factorization via complexities of the resulting conditional distributions. We propose to learn the Markov random field describing the underlying data, and use the inferred graphical model structure to construct optimized variable orderings. We illustrate our approach on two-dimensional image-like models where a structure-aware ordering leads to restricted conditioning sets, thereby reducing model complexity. Numerical experiments on Ising models with discrete data demonstrate that graph-informed orderings yield higher-fidelity generated samples compared to naive variable orderings.
Geometry-Preserving Neural Architectures on Manifolds with Boundary
Feb 03, 2026Preserving geometric structure is important in learning. We propose a unified class of geometry-aware architectures that interleave geometric updates between layers, where both projection layers and intrinsic exponential map updates arise as discretizations of projected dynamical systems on manifolds (with or without boundary). Within this framework, we establish universal approximation results for constrained neural ODEs. We also analyze architectures that enforce geometry only at the output, proving a separate universal approximation property that enables direct comparison to interleaved designs. When the constraint set is unknown, we learn projections via small-time heat-kernel limits, showing diffusion/flow-matching can be used as data-based projections. Experiments on dynamics over S^2 and SO(3), and diffusion on S^{d-1}-valued features demonstrate exact feasibility for analytic updates and strong performance for learned projections
Mean-Field Controllability and Decentralized Stabilization of Markov Chains, Part II: Asymptotic Controllability and Polynomial Feedbacks
Mar 28, 2017
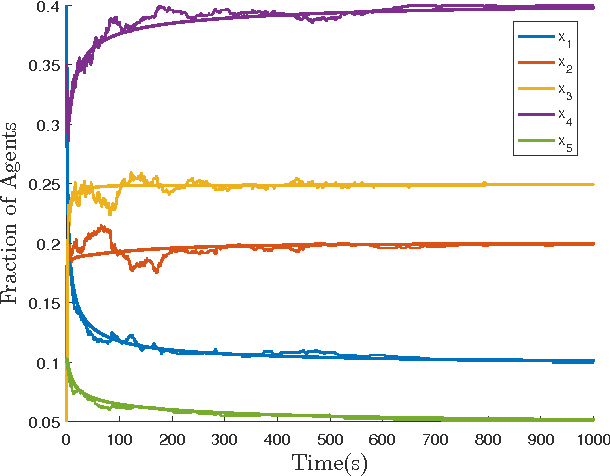
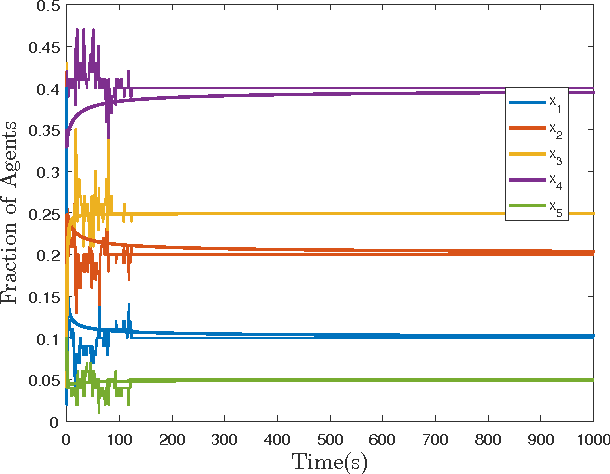
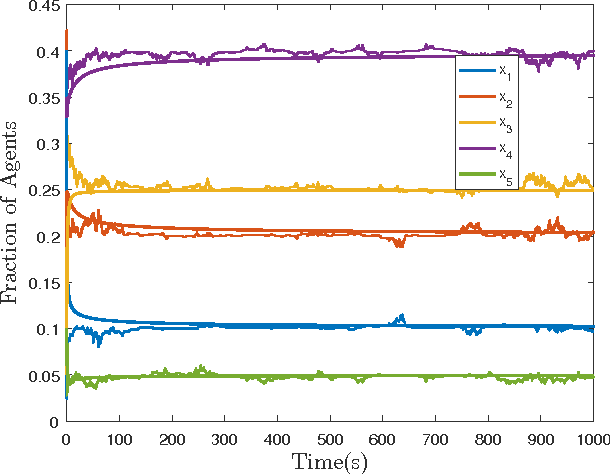
This paper, the second of a two-part series, presents a method for mean-field feedback stabilization of a swarm of agents on a finite state space whose time evolution is modeled as a continuous time Markov chain (CTMC). The resulting (mean-field) control problem is that of controlling a nonlinear system with desired global stability properties. We first prove that any probability distribution with a strongly connected support can be stabilized using time-invariant inputs. Secondly, we show the asymptotic controllability of all possible probability distributions, including distributions that assign zero density to some states and which do not necessarily have a strongly connected support. Lastly, we demonstrate that there always exists a globally asymptotically stabilizing decentralized density feedback law with the additional property that the control inputs are zero at equilibrium, whenever the graph is strongly connected and bidirected. Then the problem of synthesizing closed-loop polynomial feedback is framed as a optimization problem using state-of-the-art sum-of-squares optimization tools. The optimization problem searches for polynomial feedback laws that make the candidate Lyapunov function a stability certificate for the resulting closed-loop system. Our methodology is tested for two cases on a five vertex graph, and the stabilization properties of the constructed control laws are validated with numerical simulations of the corresponding system of ordinary differential equations.