 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiway Point Cloud Mosaicking with Diffusion and Global Optimization
Mar 30, 2024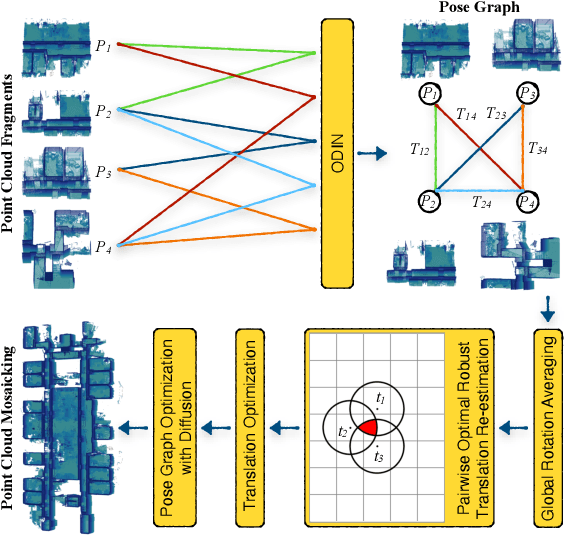
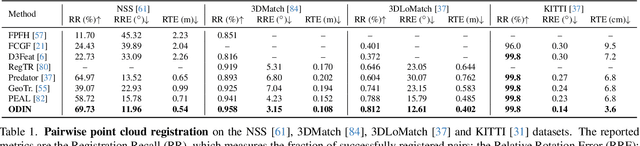
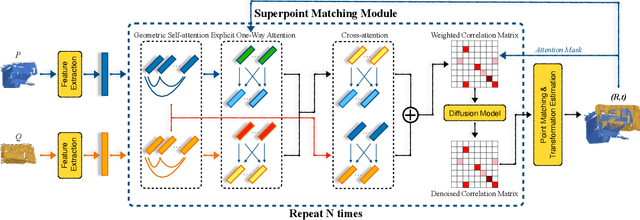
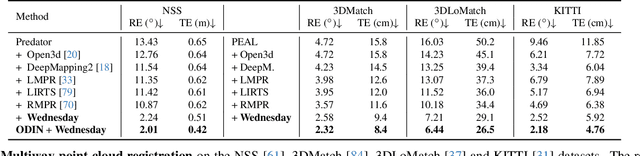
We introduce a novel framework for multiway point cloud mosaicking (named Wednesday), designed to co-align sets of partially overlapping point clouds -- typically obtained from 3D scanners or moving RGB-D cameras -- into a unified coordinate system. At the core of our approach is ODIN, a learned pairwise registration algorithm that iteratively identifies overlaps and refines attention scores, employing a diffusion-based process for denoising pairwise correlation matrices to enhance matching accuracy. Further steps include constructing a pose graph from all point clouds, performing rotation averaging, a novel robust algorithm for re-estimating translations optimally in terms of consensus maximization and translation optimization. Finally, the point cloud rotations and positions are optimized jointly by a diffusion-based approach. Tested on four diverse, large-scale datasets, our method achieves state-of-the-art pairwise and multiway registration results by a large margin on all benchmarks. Our code and models are available at https://github.com/jinsz/Multiway-Point-Cloud-Mosaicking-with-Diffusion-and-Global-Optimization.
Q-REG: End-to-End Trainable Point Cloud Registration with Surface Curvature
Sep 27, 2023



Point cloud registration has seen recent success with several learning-based methods that focus on correspondence matching and, as such, optimize only for this objective. Following the learning step of correspondence matching, they evaluate the estimated rigid transformation with a RANSAC-like framework. While it is an indispensable component of these methods, it prevents a fully end-to-end training, leaving the objective to minimize the pose error nonserved. We present a novel solution, Q-REG, which utilizes rich geometric information to estimate the rigid pose from a single correspondence. Q-REG allows to formalize the robust estimation as an exhaustive search, hence enabling end-to-end training that optimizes over both objectives of correspondence matching and rigid pose estimation. We demonstrate in the experiments that Q-REG is agnostic to the correspondence matching method and provides consistent improvement both when used only in inference and in end-to-end training. It sets a new state-of-the-art on the 3DMatch, KITTI, and ModelNet benchmarks.