 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOkayPlan: Obstacle Kinematics Augmented Dynamic Real-time Path Planning via Particle Swarm Optimization
Jan 10, 2024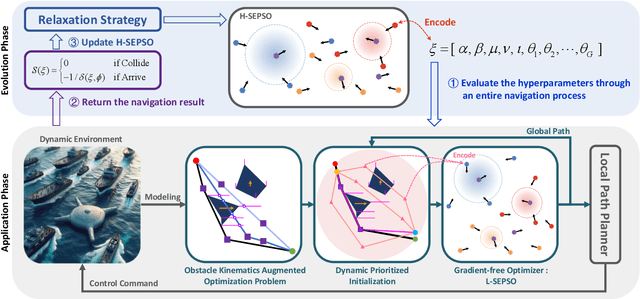

Existing Global Path Planning (GPP) algorithms predominantly presume planning in a static environment. This assumption immensely limits their applications to Unmanned Surface Vehicles (USVs) that typically navigate in dynamic environments. To address this limitation, we present OkayPlan, a GPP algorithm capable of generating safe and short paths in dynamic scenarios at a real-time executing speed (125 Hz on a desktop-class computer). Specifically, we approach the challenge of dynamic obstacle avoidance by formulating the path planning problem as an obstacle kinematics augmented optimization problem, which can be efficiently resolved through a PSO-based optimizer at a real-time speed. Meanwhile, a Dynamic Prioritized Initialization (DPI) mechanism that adaptively initializes potential solutions for the optimization problem is established to further ameliorate the solution quality. Additionally, a relaxation strategy that facilitates the autonomous tuning of OkayPlan's hyperparameters in dynamic environments is devised. Comparative experiments involving canonical and contemporary GPP algorithms, along with ablation studies, have been conducted to substantiate the efficacy of our approach. Results indicate that OkayPlan outstrips existing methods in terms of path safety, length optimality, and computational efficiency, establishing it as a potent GPP technique for dynamic environments. The video and code associated with this paper are accessible at https://github.com/XinJingHao/OkayPlan.