 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Lane Detection using FCN
Apr 19, 2020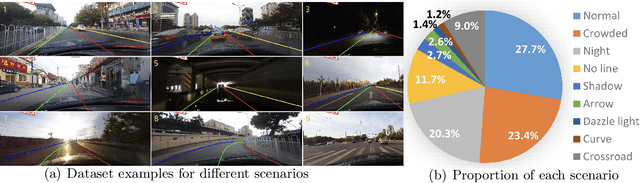
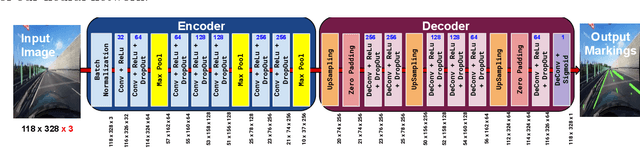
Automatic lane detection is a crucial technology that enables self-driving cars to properly position themselves in a multi-lane urban driving environments. However, detecting diverse road markings in various weather conditions is a challenging task for conventional image processing or computer vision techniques. In recent years, the application of Deep Learning and Neural Networks in this area has proven to be very effective. In this project, we designed an Encoder- Decoder, Fully Convolutional Network for lane detection. This model was applied to a real-world large scale dataset and achieved a level of accuracy that outperformed our baseline model.
Machine Learning based Pallets Detection and Tracking in AGVs
Apr 19, 2020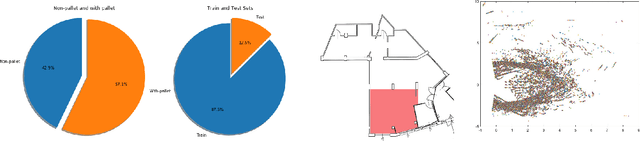
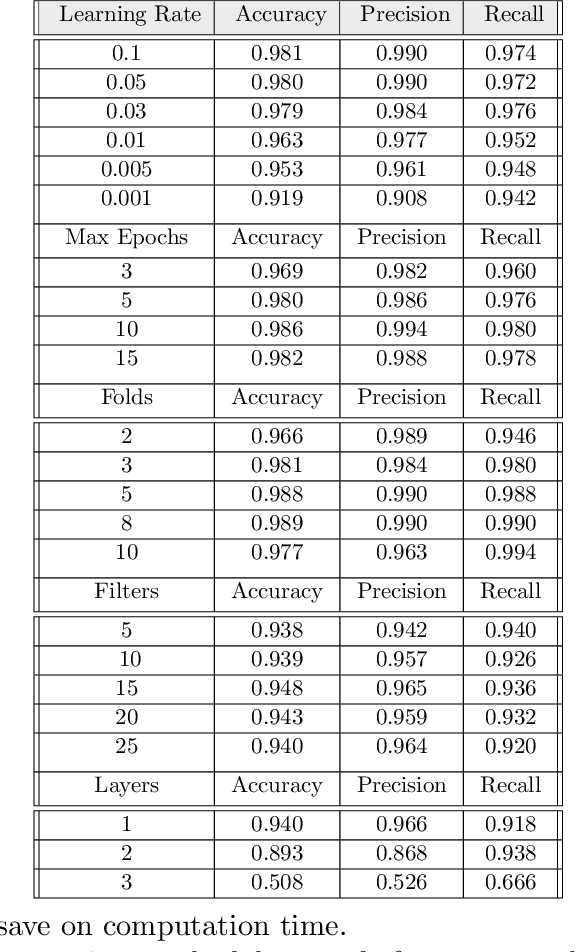

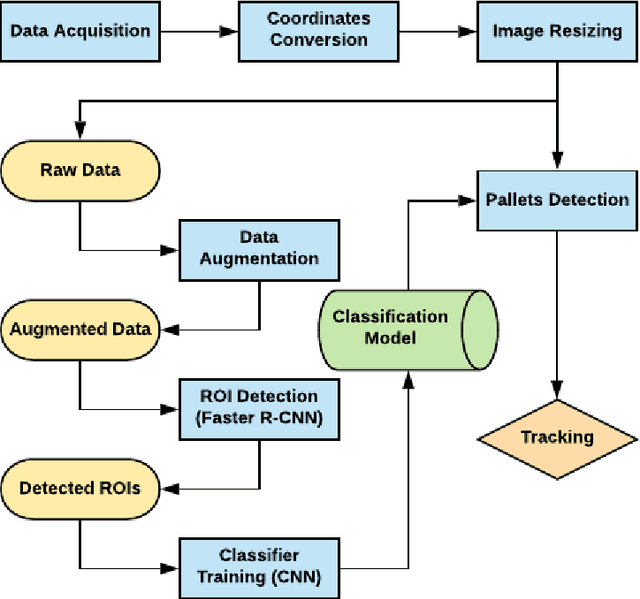
The use of automated guided vehicles (AGVs) has played a pivotal role in manufacturing and distribution operations, providing reliable and efficient product handling. In this project, we constructed a deep learning-based pallets detection and tracking architecture for pallets detection and position tracking. By using data preprocessing and augmentation techniques and experiment with hyperparameter tuning, we achieved the result with 25% reduction of error rate, 28.5% reduction of false negative rate, and 20% reduction of training time.
Analysis on DeepLabV3+ Performance for Automatic Steel Defects Detection
Apr 15, 2020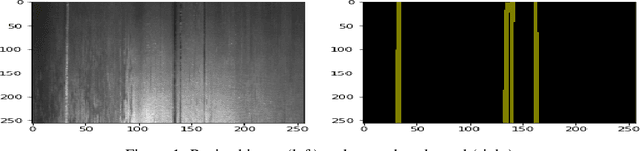
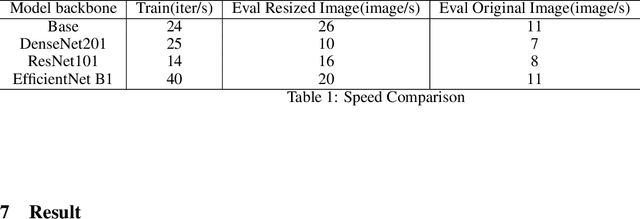
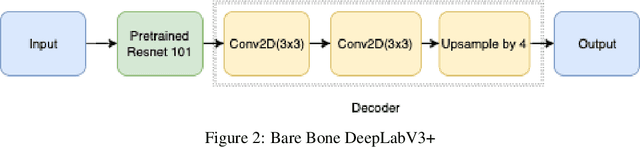
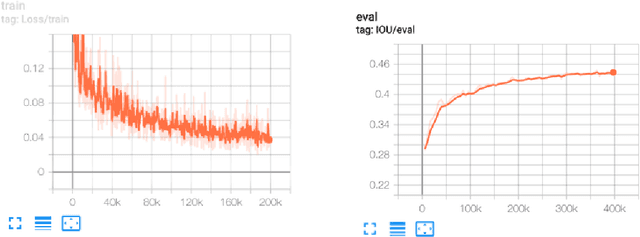
Our works experimented DeepLabV3+ with different backbones on a large volume of steel images aiming to automatically detect different types of steel defects. Our methods applied random weighted augmentation to balance different defects types in the training set. And then applied DeeplabV3+ model three different backbones, ResNet, DenseNet and EfficientNet, on segmenting defection regions on the steel images. Based on experiments, we found that applying ResNet101 or EfficientNet as backbones could reach the best IoU scores on the test set, which is around 0.57, comparing with 0.325 for using DenseNet. Also, DeepLabV3+ model with ResNet101 as backbone has the fewest training time.