Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Lane Detection using FCN
Paper and Code
Apr 19, 2020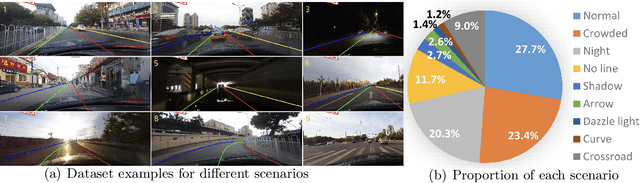
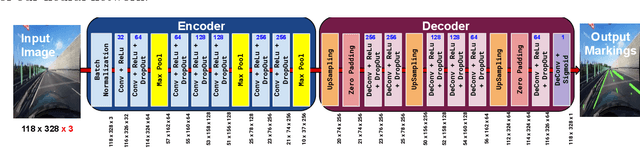
Automatic lane detection is a crucial technology that enables self-driving cars to properly position themselves in a multi-lane urban driving environments. However, detecting diverse road markings in various weather conditions is a challenging task for conventional image processing or computer vision techniques. In recent years, the application of Deep Learning and Neural Networks in this area has proven to be very effective. In this project, we designed an Encoder- Decoder, Fully Convolutional Network for lane detection. This model was applied to a real-world large scale dataset and achieved a level of accuracy that outperformed our baseline model.
* 6 pages, 6 figures
View paper on