 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLOBirDrone: Dataset for Bird vs Drone Detection and Classification and a YOLO based enhanced learning architecture
Jan 13, 2026The use of aerial drones for commercial and defense applications has benefited in many ways and is therefore utilized in several different application domains. However, they are also increasingly used for targeted attacks, posing a significant safety challenge and necessitating the development of drone detection systems. Vision-based drone detection systems currently have an accuracy limitation and struggle to distinguish between drones and birds, particularly when the birds are small in size. This research work proposes a novel YOLOBirDrone architecture that improves the detection and classification accuracy of birds and drones. YOLOBirDrone has different components, including an adaptive and extended layer aggregation (AELAN), a multi-scale progressive dual attention module (MPDA), and a reverse MPDA (RMPDA) to preserve shape information and enrich features with local and global spatial and channel information. A large-scale dataset, BirDrone, is also introduced in this article, which includes small and challenging objects for robust aerial object identification. Experimental results demonstrate an improvement in performance metrics through the proposed YOLOBirDrone architecture compared to other state-of-the-art algorithms, with detection accuracy reaching approximately 85% across various scenarios.
Analysis of different disparity estimation techniques on aerial stereo image datasets
Oct 09, 2024With the advent of aerial image datasets, dense stereo matching has gained tremendous progress. This work analyses dense stereo correspondence analysis on aerial images using different techniques. Traditional methods, optimization based methods and learning based methods have been implemented and compared here for aerial images. For traditional methods, we implemented the architecture of Stereo SGBM while using different cost functions to get an understanding of their performance on aerial datasets. Analysis of most of the methods in standard datasets has shown good performance, however in case of aerial dataset, not much benchmarking is available. Visual qualitative and quantitative analysis has been carried out for two stereo aerial datasets in order to compare different cost functions and techniques for the purpose of depth estimation from stereo images. Using existing pre-trained models, recent learning based architectures have also been tested on stereo pairs along with different cost functions in SGBM. The outputs and given ground truth are compared using MSE, SSIM and other error metrics.
Incremental learning of LSTM framework for sensor fusion in attitude estimation
Aug 04, 2021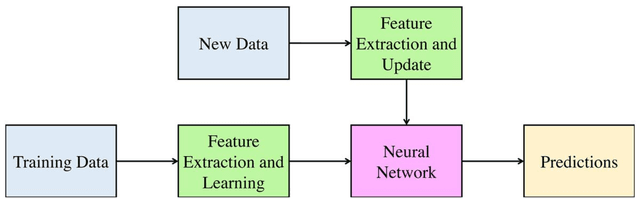
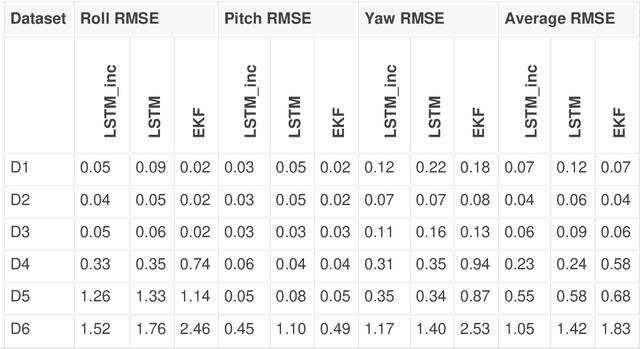
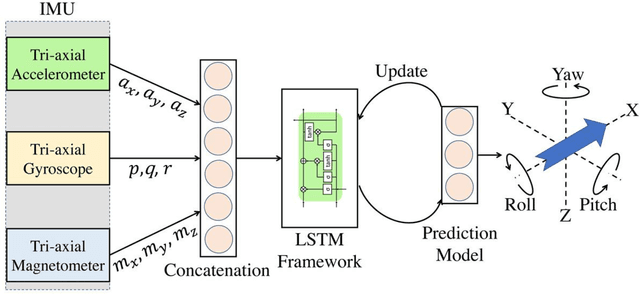
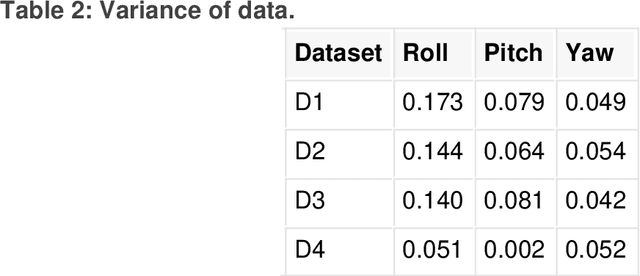
This paper presents a novel method for attitude estimation of an object in 3D space by incremental learning of the Long-Short Term Memory (LSTM) network. Gyroscope, accelerometer, and magnetometer are few widely used sensors in attitude estimation applications. Traditionally, multi-sensor fusion methods such as the Extended Kalman Filter and Complementary Filter are employed to fuse the measurements from these sensors. However, these methods exhibit limitations in accounting for the uncertainty, unpredictability, and dynamic nature of the motion in real-world situations. In this paper, the inertial sensors data are fed to the LSTM network which are then updated incrementally to incorporate the dynamic changes in motion occurring in the run time. The robustness and efficiency of the proposed framework is demonstrated on the dataset collected from a commercially available inertial measurement unit. The proposed framework offers a significant improvement in the results compared to the traditional method, even in the case of a highly dynamic environment. The LSTM framework-based attitude estimation approach can be deployed on a standard AI-supported processing module for real-time applications.
Joint Forward-Backward Visual Odometry for Stereo Cameras
Dec 21, 2019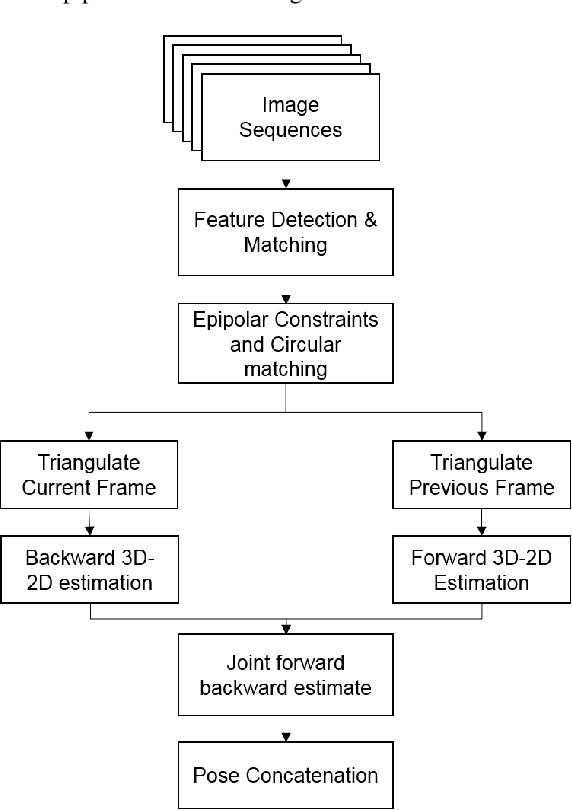
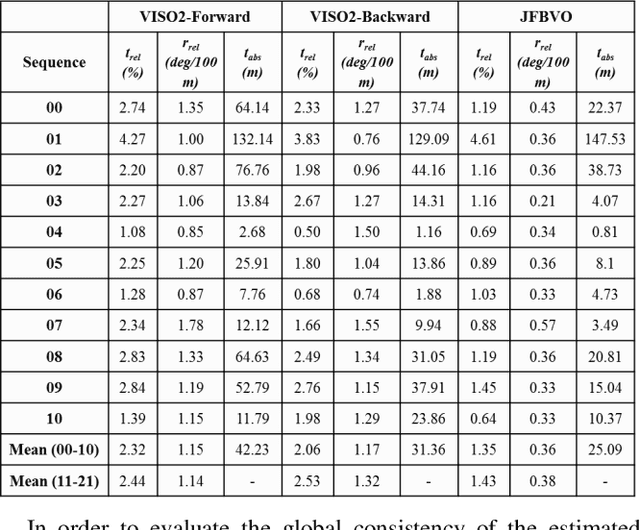
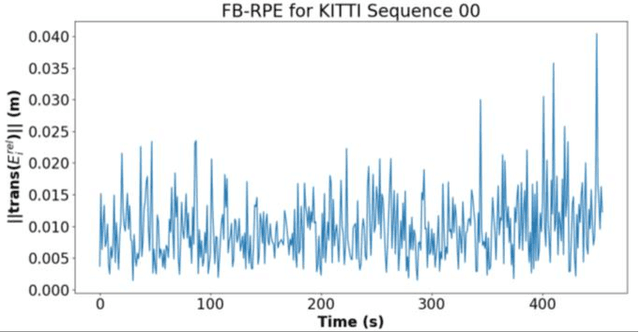

Visual odometry is a widely used technique in the field of robotics and automation to keep a track on the location of a robot using visual cues alone. In this paper, we propose a joint forward backward visual odometry framework by combining both, the forward motion and backward motion estimated from stereo cameras. The basic framework of LIBVIOS2 is used here for pose estimation as it can run in real-time on standard CPUs. The complementary nature of errors in the forward and backward mode of visual odometry helps in providing a refined motion estimation upon combining these individual estimates. In addition, two reliability measures, that is, forward-backward relative pose error and forward-backward absolute pose error have been proposed for evaluating visual odometry frameworks on its own without the requirement of any ground truth data. The proposed scheme is evaluated on the KITTI visual odometry dataset. The experimental results demonstrate improved accuracy of the proposed scheme over the traditional odometry pipeline without much increase in the system overload.
Evolution of Visual Odometry Techniques
Apr 30, 2018With rapid advancements in the area of mobile robotics and industrial automation, a growing need has arisen towards accurate navigation and localization of moving objects. Camera based motion estimation is one such technique which is gaining huge popularity owing to its simplicity and use of limited resources in generating motion path. In this paper, an attempt is made to introduce this topic for beginners covering different aspects of vision based motion estimation task. The evolution of VO schemes over last few decades is discussed under two broad categories, that is, geometric and non-geometric approaches. The geometric approaches are further detailed under three different classes, that is, feature-based, appearance-based, and a hybrid of feature and appearance based schemes. The non-geometric approach is one of the recent paradigm shift from conventional pose estimation technique and is thus discussed in a separate section. Towards the end, a list of different datasets for visual odometry and allied research areas are provided for a ready reference.