 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Forward-Backward Visual Odometry for Stereo Cameras
Dec 21, 2019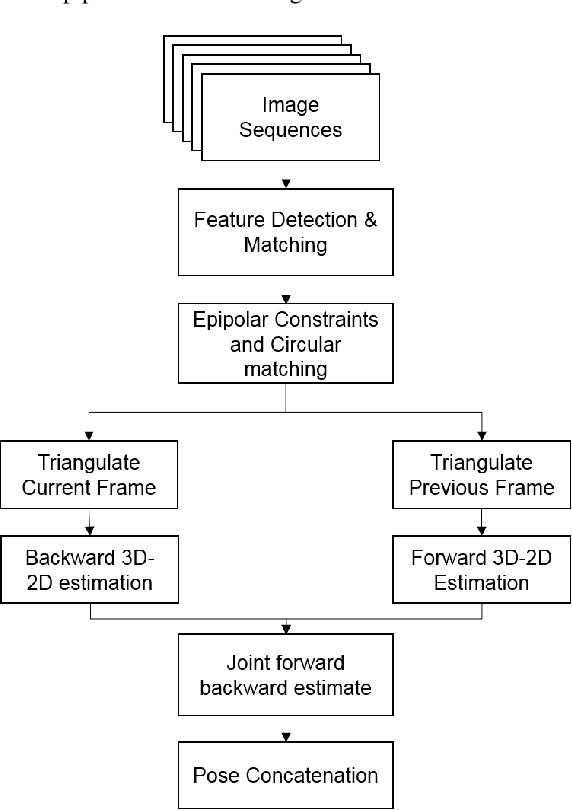
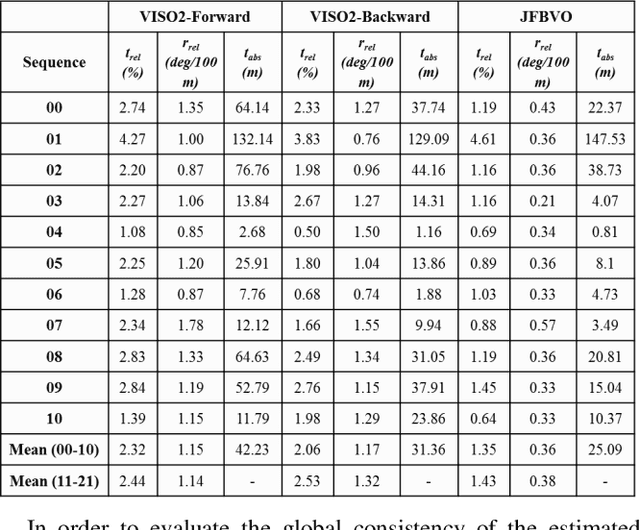
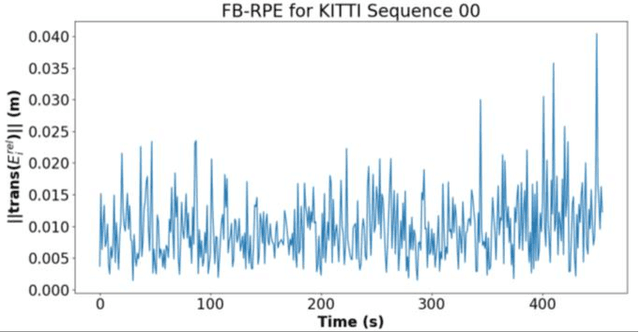

Visual odometry is a widely used technique in the field of robotics and automation to keep a track on the location of a robot using visual cues alone. In this paper, we propose a joint forward backward visual odometry framework by combining both, the forward motion and backward motion estimated from stereo cameras. The basic framework of LIBVIOS2 is used here for pose estimation as it can run in real-time on standard CPUs. The complementary nature of errors in the forward and backward mode of visual odometry helps in providing a refined motion estimation upon combining these individual estimates. In addition, two reliability measures, that is, forward-backward relative pose error and forward-backward absolute pose error have been proposed for evaluating visual odometry frameworks on its own without the requirement of any ground truth data. The proposed scheme is evaluated on the KITTI visual odometry dataset. The experimental results demonstrate improved accuracy of the proposed scheme over the traditional odometry pipeline without much increase in the system overload.
Evolution of Visual Odometry Techniques
Apr 30, 2018With rapid advancements in the area of mobile robotics and industrial automation, a growing need has arisen towards accurate navigation and localization of moving objects. Camera based motion estimation is one such technique which is gaining huge popularity owing to its simplicity and use of limited resources in generating motion path. In this paper, an attempt is made to introduce this topic for beginners covering different aspects of vision based motion estimation task. The evolution of VO schemes over last few decades is discussed under two broad categories, that is, geometric and non-geometric approaches. The geometric approaches are further detailed under three different classes, that is, feature-based, appearance-based, and a hybrid of feature and appearance based schemes. The non-geometric approach is one of the recent paradigm shift from conventional pose estimation technique and is thus discussed in a separate section. Towards the end, a list of different datasets for visual odometry and allied research areas are provided for a ready reference.