 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Autonomous Surface Vehicle for Long Term Operations
Aug 27, 2018
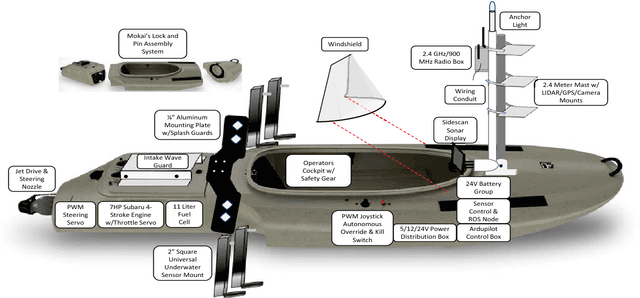
Environmental monitoring of marine environments presents several challenges: the harshness of the environment, the often remote location, and most importantly, the vast area it covers. Manual operations are time consuming, often dangerous, and labor intensive. Operations from oceanographic vessels are costly and limited to open seas and generally deeper bodies of water. In addition, with lake, river, and ocean shoreline being a finite resource, waterfront property presents an ever increasing valued commodity, requiring exploration and continued monitoring of remote waterways. In order to efficiently explore and monitor currently known marine environments as well as reach and explore remote areas of interest, we present a design of an autonomous surface vehicle (ASV) with the power to cover large areas, the payload capacity to carry sufficient power and sensor equipment, and enough fuel to remain on task for extended periods. An analysis of the design and a discussion on lessons learned during deployments is presented in this paper.