 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Multi-Strand Graph for a PTZ Tracker
Jun 29, 2015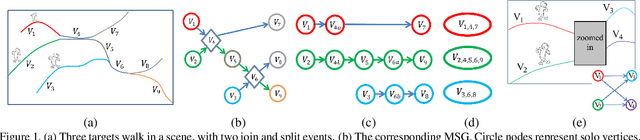
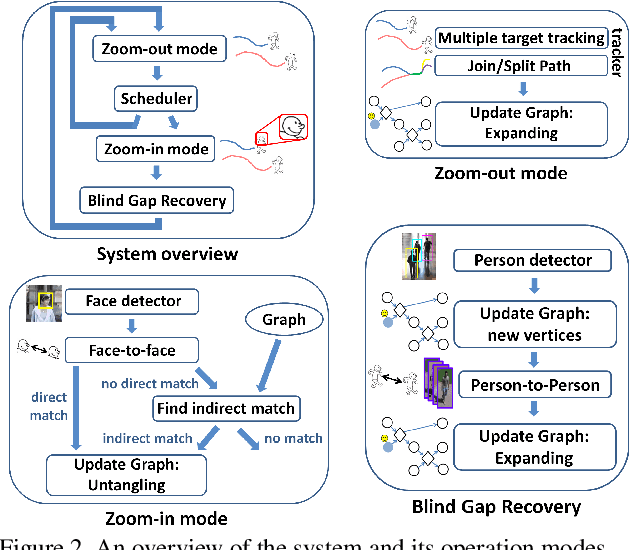

High-resolution images can be used to resolve matching ambiguities between trajectory fragments (tracklets), which is one of the main challenges in multiple target tracking. A PTZ camera, which can pan, tilt and zoom, is a powerful and efficient tool that offers both close-up views and wide area coverage on demand. The wide-area view makes it possible to track many targets while the close-up view allows individuals to be identified from high-resolution images of their faces. A central component of a PTZ tracking system is a scheduling algorithm that determines which target to zoom in on. In this paper we study this scheduling problem from a theoretical perspective, where the high resolution images are also used for tracklet matching. We propose a novel data structure, the Multi-Strand Tracking Graph (MSG), which represents the set of tracklets computed by a tracker and the possible associations between them. The MSG allows efficient scheduling as well as resolving -- directly or by elimination -- matching ambiguities between tracklets. The main feature of the MSG is the auxiliary data saved in each vertex, which allows efficient computation while avoiding time-consuming graph traversal. Synthetic data simulations are used to evaluate our scheduling algorithm and to demonstrate its superiority over a na\"ive one.