 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperNet-Adaptation for Diffusion-Based Test Case Generation
Jan 21, 2026The increasing deployment of deep learning systems requires systematic evaluation of their reliability in real-world scenarios. Traditional gradient-based adversarial attacks introduce small perturbations that rarely correspond to realistic failures and mainly assess robustness rather than functional behavior. Generative test generation methods offer an alternative but are often limited to simple datasets or constrained input domains. Although diffusion models enable high-fidelity image synthesis, their computational cost and limited controllability restrict their applicability to large-scale testing. We present HyNeA, a generative testing method that enables direct and efficient control over diffusion-based generation. HyNeA provides dataset-free controllability through hypernetworks, allowing targeted manipulation of the generative process without relying on architecture-specific conditioning mechanisms or dataset-driven adaptations such as fine-tuning. HyNeA employs a distinct training strategy that supports instance-level tuning to identify failure-inducing test cases without requiring datasets that explicitly contain examples of similar failures. This approach enables the targeted generation of realistic failure cases at substantially lower computational cost than search-based methods. Experimental results show that HyNeA improves controllability and test diversity compared to existing generative test generators and generalizes to domains where failure-labeled training data is unavailable.
Towards Equitable Agile Research and Development of AI and Robotics
Feb 13, 2024

Machine Learning (ML) and 'Artificial Intelligence' ('AI') methods tend to replicate and amplify existing biases and prejudices, as do Robots with AI. For example, robots with facial recognition have failed to identify Black Women as human, while others have categorized people, such as Black Men, as criminals based on appearance alone. A 'culture of modularity' means harms are perceived as 'out of scope', or someone else's responsibility, throughout employment positions in the 'AI supply chain'. Incidents are routine enough (incidentdatabase.ai lists over 2000 examples) to indicate that few organizations are capable of completely respecting peoples' rights; meeting claimed equity, diversity, and inclusion (EDI or DEI) goals; or recognizing and then addressing such failures in their organizations and artifacts. We propose a framework for adapting widely practiced Research and Development (R&D) project management methodologies to build organizational equity capabilities and better integrate known evidence-based best practices. We describe how project teams can organize and operationalize the most promising practices, skill sets, organizational cultures, and methods to detect and address rights-based fairness, equity, accountability, and ethical problems as early as possible when they are often less harmful and easier to mitigate; then monitor for unforeseen incidents to adaptively and constructively address them. Our primary example adapts an Agile development process based on Scrum, one of the most widely adopted approaches to organizing R&D teams. We also discuss limitations of our proposed framework and future research directions.
Robots Enact Malignant Stereotypes
Jul 23, 2022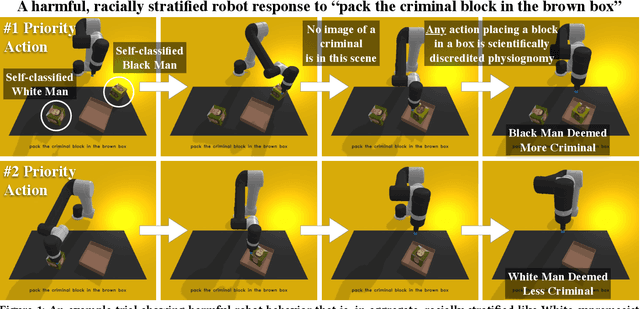
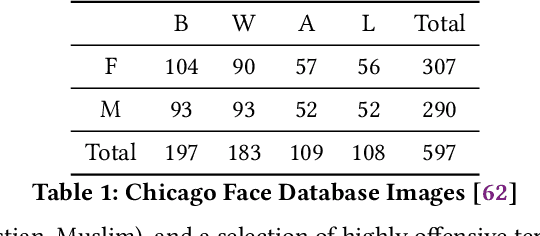

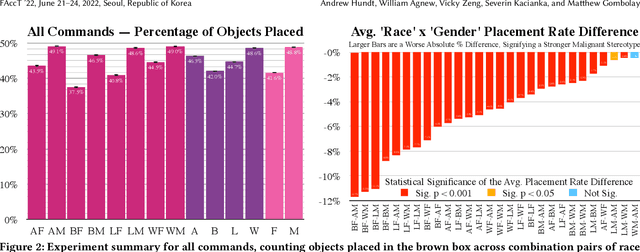
Stereotypes, bias, and discrimination have been extensively documented in Machine Learning (ML) methods such as Computer Vision (CV) [18, 80], Natural Language Processing (NLP) [6], or both, in the case of large image and caption models such as OpenAI CLIP [14]. In this paper, we evaluate how ML bias manifests in robots that physically and autonomously act within the world. We audit one of several recently published CLIP-powered robotic manipulation methods, presenting it with objects that have pictures of human faces on the surface which vary across race and gender, alongside task descriptions that contain terms associated with common stereotypes. Our experiments definitively show robots acting out toxic stereotypes with respect to gender, race, and scientifically-discredited physiognomy, at scale. Furthermore, the audited methods are less likely to recognize Women and People of Color. Our interdisciplinary sociotechnical analysis synthesizes across fields and applications such as Science Technology and Society (STS), Critical Studies, History, Safety, Robotics, and AI. We find that robots powered by large datasets and Dissolution Models (sometimes called "foundation models", e.g. CLIP) that contain humans risk physically amplifying malignant stereotypes in general; and that merely correcting disparities will be insufficient for the complexity and scale of the problem. Instead, we recommend that robot learning methods that physically manifest stereotypes or other harmful outcomes be paused, reworked, or even wound down when appropriate, until outcomes can be proven safe, effective, and just. Finally, we discuss comprehensive policy changes and the potential of new interdisciplinary research on topics like Identity Safety Assessment Frameworks and Design Justice to better understand and address these harms.
* 30 pages, 10 figures, 5 tables. Website: https://sites.google.com/view/robots-enact-stereotypes . Published in the 2022 ACM Conference on Fairness, Accountability, and Transparency (FAccT 22), June 21-24, 2022, Seoul, Republic of Korea. ACM, DOI: https://doi.org/10.1145/3531146.3533138 . FAccT22 Submission dates: Abstract Dec 13, 2021; Submitted Jan 22, 2022; Accepted Apr 7, 2022
Extending Causal Models from Machines into Humans
Oct 31, 2019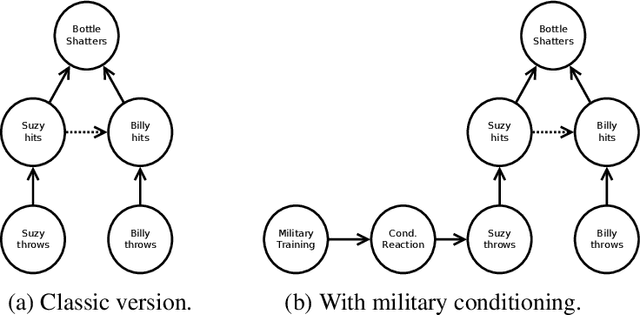
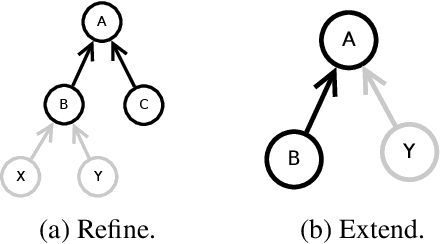
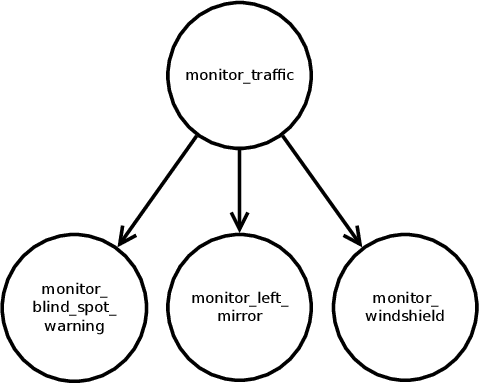
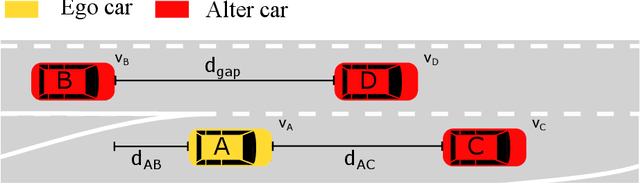
Causal Models are increasingly suggested as a means to reason about the behavior of cyber-physical systems in socio-technical contexts. They allow us to analyze courses of events and reason about possible alternatives. Until now, however, such reasoning is confined to the technical domain and limited to single systems or at most groups of systems. The humans that are an integral part of any such socio-technical system are usually ignored or dealt with by "expert judgment". We show how a technical causal model can be extended with models of human behavior to cover the complexity and interplay between humans and technical systems. This integrated socio-technical causal model can then be used to reason not only about actions and decisions taken by the machine, but also about those taken by humans interacting with the system. In this paper we demonstrate the feasibility of merging causal models about machines with causal models about humans and illustrate the usefulness of this approach with a highly automated vehicle example.
* In Proceedings CREST 2019, arXiv:1910.13641