 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistilling Privileged Information for Dubins Traveling Salesman Problems with Neighborhoods
Apr 25, 2024



This paper presents a novel learning approach for Dubins Traveling Salesman Problems(DTSP) with Neighborhood (DTSPN) to quickly produce a tour of a non-holonomic vehicle passing through neighborhoods of given task points. The method involves two learning phases: initially, a model-free reinforcement learning approach leverages privileged information to distill knowledge from expert trajectories generated by the LinKernighan heuristic (LKH) algorithm. Subsequently, a supervised learning phase trains an adaptation network to solve problems independently of privileged information. Before the first learning phase, a parameter initialization technique using the demonstration data was also devised to enhance training efficiency. The proposed learning method produces a solution about 50 times faster than LKH and substantially outperforms other imitation learning and RL with demonstration schemes, most of which fail to sense all the task points.
Path Planning in 3D with Motion Primitives for Wind Energy-Harvesting Fixed-Wing Aircraft
Nov 17, 2023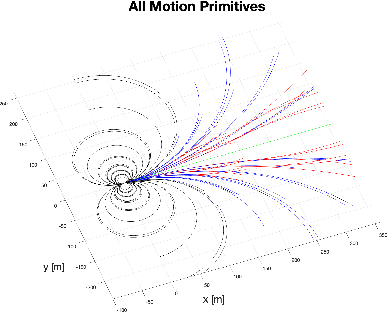
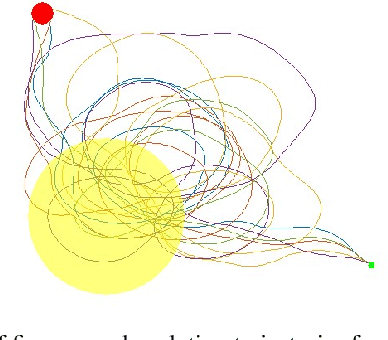
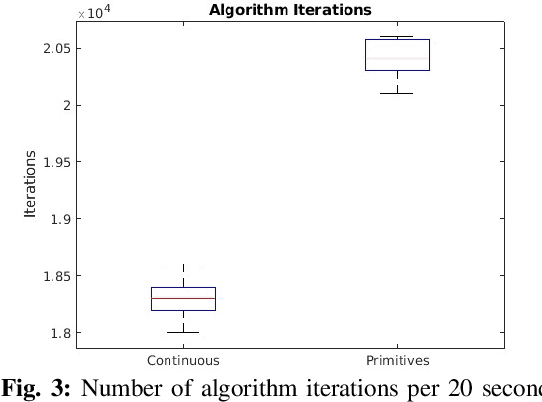
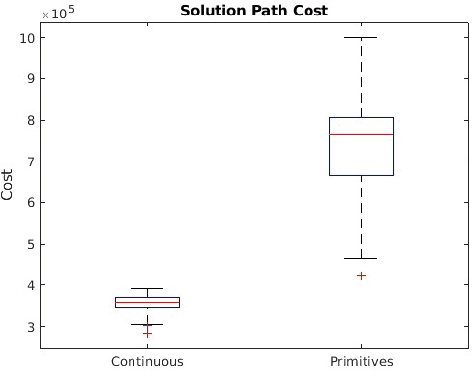
In this work, a set of motion primitives is defined for use in an energy-aware motion planning problem. The motion primitives are defined as sequences of control inputs to a simplified four-DOF dynamics model and are used to replace the traditional continuous control space used in many sampling-based motion planners. The primitives are implemented in a Stable Sparse Rapidly Exploring Random Tree (SST) motion planner and compared to an identical planner using a continuous control space. The planner using primitives was found to run 11.0\% faster but yielded solution paths that were on average worse with higher variance. Also, the solution path travel time is improved by about 50\%. Using motion primitives for sampling spaces in SST can effectively reduce the run time of the algorithm, although at the cost of solution quality.