 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning in 3D with Motion Primitives for Wind Energy-Harvesting Fixed-Wing Aircraft
Paper and Code
Nov 17, 2023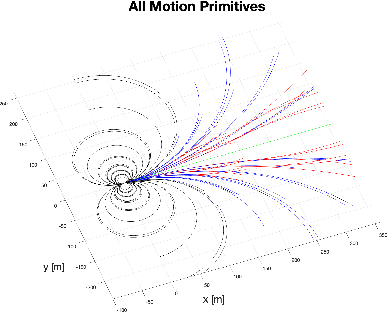
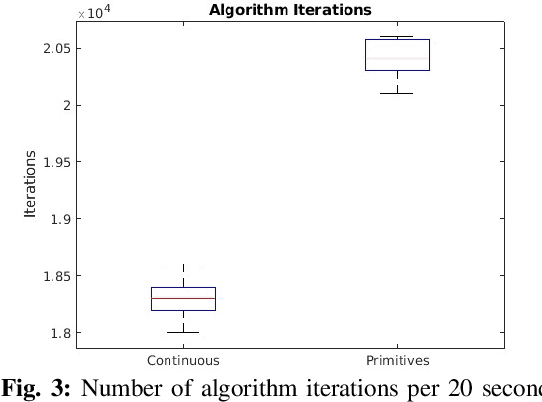
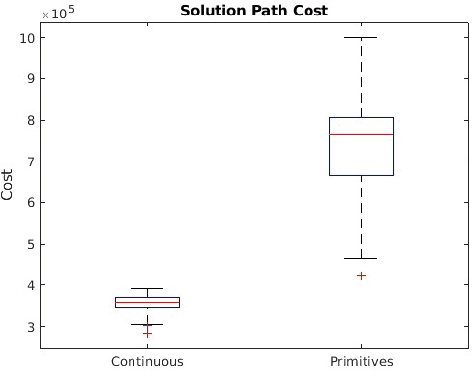
In this work, a set of motion primitives is defined for use in an energy-aware motion planning problem. The motion primitives are defined as sequences of control inputs to a simplified four-DOF dynamics model and are used to replace the traditional continuous control space used in many sampling-based motion planners. The primitives are implemented in a Stable Sparse Rapidly Exploring Random Tree (SST) motion planner and compared to an identical planner using a continuous control space. The planner using primitives was found to run 11.0\% faster but yielded solution paths that were on average worse with higher variance. Also, the solution path travel time is improved by about 50\%. Using motion primitives for sampling spaces in SST can effectively reduce the run time of the algorithm, although at the cost of solution quality.