 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrompt Tuning without Labeled Samples for Zero-Shot Node Classification in Text-Attributed Graphs
Jan 07, 2026Node classification is a fundamental problem in information retrieval with many real-world applications, such as community detection in social networks, grouping articles published online and product categorization in e-commerce. Zero-shot node classification in text-attributed graphs (TAGs) presents a significant challenge, particularly due to the absence of labeled data. In this paper, we propose a novel Zero-shot Prompt Tuning (ZPT) framework to address this problem by leveraging a Universal Bimodal Conditional Generator (UBCG). Our approach begins with pre-training a graph-language model to capture both the graph structure and the associated textual descriptions of each node. Following this, a conditional generative model is trained to learn the joint distribution of nodes in both graph and text modalities, enabling the generation of synthetic samples for each class based solely on the class name. These synthetic node and text embeddings are subsequently used to perform continuous prompt tuning, facilitating effective node classification in a zero-shot setting. Furthermore, we conduct extensive experiments on multiple benchmark datasets, demonstrating that our framework performs better than existing state-of-the-art baselines. We also provide ablation studies to validate the contribution of the bimodal generator. The code is provided at: https://github.com/Sethup123/ZPT.
Online Lifelong Generalized Zero-Shot Learning
Mar 22, 2021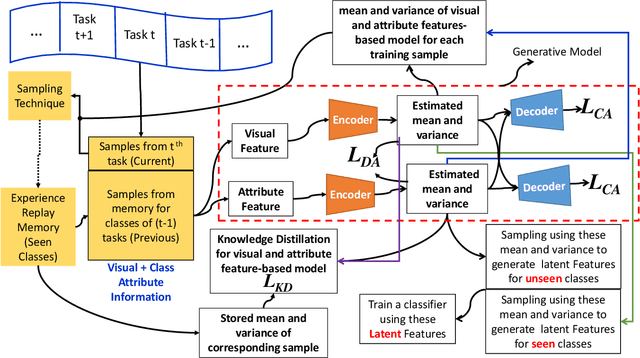
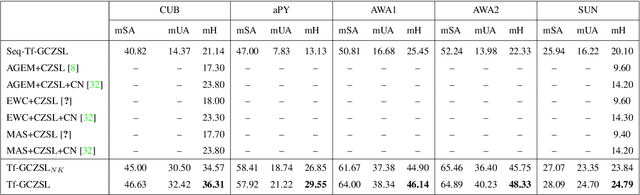
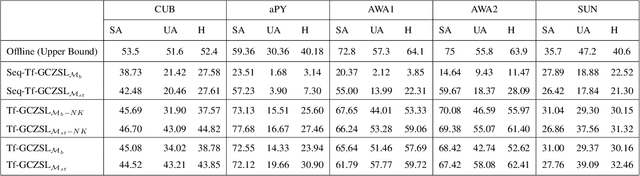
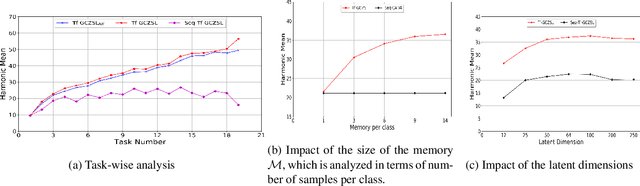
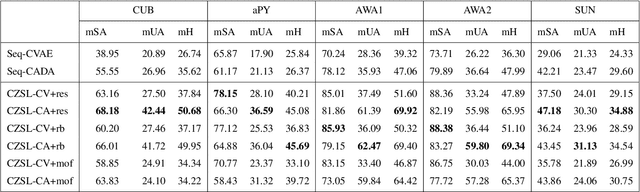
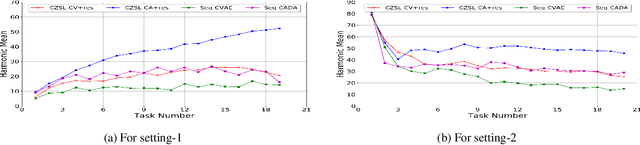
Methods proposed in the literature for zero-shot learning (ZSL) are typically suitable for offline learning and cannot continually learn from sequential streaming data. The sequential data comes in the form of tasks during training. Recently, a few attempts have been made to handle this issue and develop continual ZSL (CZSL) methods. However, these CZSL methods require clear task-boundary information between the tasks during training, which is not practically possible. This paper proposes a task-free (i.e., task-agnostic) CZSL method, which does not require any task information during continual learning. The proposed task-free CZSL method employs a variational autoencoder (VAE) for performing ZSL. To develop the CZSL method, we combine the concept of experience replay with knowledge distillation and regularization. Here, knowledge distillation is performed using the training sample's dark knowledge, which essentially helps overcome the catastrophic forgetting issue. Further, it is enabled for task-free learning using short-term memory. Finally, a classifier is trained on the synthetic features generated at the latent space of the VAE. Moreover, the experiments are conducted in a challenging and practical ZSL setup, i.e., generalized ZSL (GZSL). These experiments are conducted for two kinds of single-head continual learning settings: (i) mild setting-: task-boundary is known only during training but not during testing; (ii) strict setting-: task-boundary is not known at training, as well as testing. Experimental results on five benchmark datasets exhibit the validity of the approach for CZSL.
Generative Replay-based Continual Zero-Shot Learning
Jan 22, 2021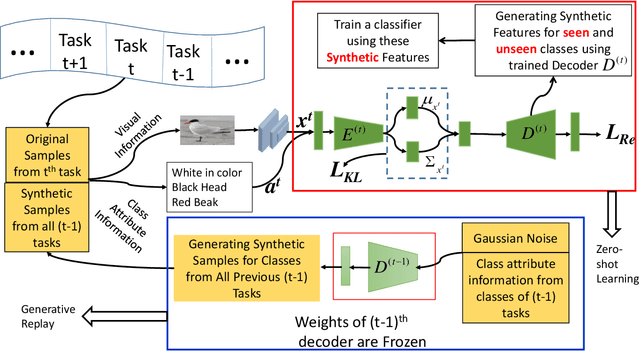


Zero-shot learning is a new paradigm to classify objects from classes that are not available at training time. Zero-shot learning (ZSL) methods have attracted considerable attention in recent years because of their ability to classify unseen/novel class examples. Most of the existing approaches on ZSL works when all the samples from seen classes are available to train the model, which does not suit real life. In this paper, we tackle this hindrance by developing a generative replay-based continual ZSL (GRCZSL). The proposed method endows traditional ZSL to learn from streaming data and acquire new knowledge without forgetting the previous tasks' gained experience. We handle catastrophic forgetting in GRCZSL by replaying the synthetic samples of seen classes, which have appeared in the earlier tasks. These synthetic samples are synthesized using the trained conditional variational autoencoder (VAE) over the immediate past task. Moreover, we only require the current and immediate previous VAE at any time for training and testing. The proposed GRZSL method is developed for a single-head setting of continual learning, simulating a real-world problem setting. In this setting, task identity is given during training but unavailable during testing. GRCZSL performance is evaluated on five benchmark datasets for the generalized setup of ZSL with fixed and incremental class settings of continual learning. Experimental results show that the proposed method significantly outperforms the baseline method and makes it more suitable for real-world applications.
Generalized Continual Zero-Shot Learning
Nov 17, 2020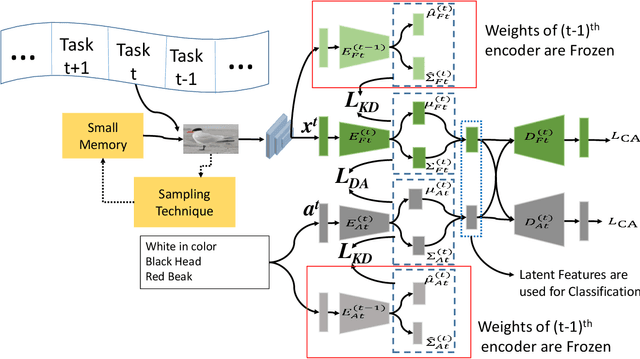
Recently, zero-shot learning (ZSL) emerged as an exciting topic and attracted a lot of attention. ZSL aims to classify unseen classes by transferring the knowledge from seen classes to unseen classes based on the class description. Despite showing promising performance, ZSL approaches assume that the training samples from all seen classes are available during the training, which is practically not feasible. To address this issue, we propose a more generalized and practical setup for ZSL, i.e., continual ZSL (CZSL), where classes arrive sequentially in the form of a task and it actively learns from the changing environment by leveraging the past experience. Further, to enhance the reliability, we develop CZSL for a single head continual learning setting where task identity is revealed during the training process but not during the testing. To avoid catastrophic forgetting and intransigence, we use knowledge distillation and storing and replay the few samples from previous tasks using a small episodic memory. We develop baselines and evaluate generalized CZSL on five ZSL benchmark datasets for two different settings of continual learning: with and without class incremental. Moreover, CZSL is developed for two types of variational autoencoders, which generates two types of features for classification: (i) generated features at output space and (ii) generated discriminative features at the latent space. The experimental results clearly indicate the single head CZSL is more generalizable and suitable for practical applications.