 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Development, and Evaluation of an Interactive Personalized Social Robot to Monitor and Coach Post-Stroke Rehabilitation Exercises
May 12, 2023Socially assistive robots are increasingly being explored to improve the engagement of older adults and people with disability in health and well-being-related exercises. However, even if people have various physical conditions, most prior work on social robot exercise coaching systems has utilized generic, predefined feedback. The deployment of these systems still remains a challenge. In this paper, we present our work of iteratively engaging therapists and post-stroke survivors to design, develop, and evaluate a social robot exercise coaching system for personalized rehabilitation. Through interviews with therapists, we designed how this system interacts with the user and then developed an interactive social robot exercise coaching system. This system integrates a neural network model with a rule-based model to automatically monitor and assess patients' rehabilitation exercises and can be tuned with individual patient's data to generate real-time, personalized corrective feedback for improvement. With the dataset of rehabilitation exercises from 15 post-stroke survivors, we demonstrated our system significantly improves its performance to assess patients' exercises while tuning with held-out patient's data. In addition, our real-world evaluation study showed that our system can adapt to new participants and achieved 0.81 average performance to assess their exercises, which is comparable to the experts' agreement level. We further discuss the potential benefits and limitations of our system in practice.
Enabling AI and Robotic Coaches for Physical Rehabilitation Therapy: Iterative Design and Evaluation with Therapists and Post-Stroke Survivors
Jun 15, 2021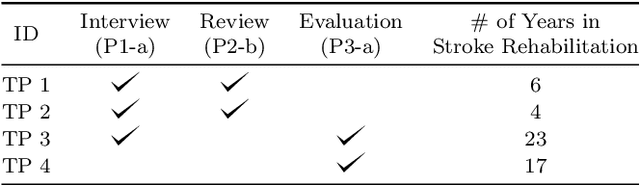
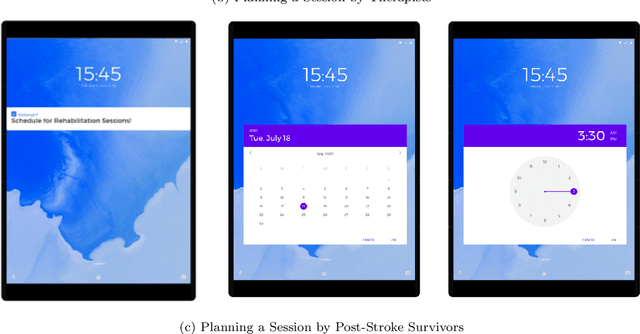
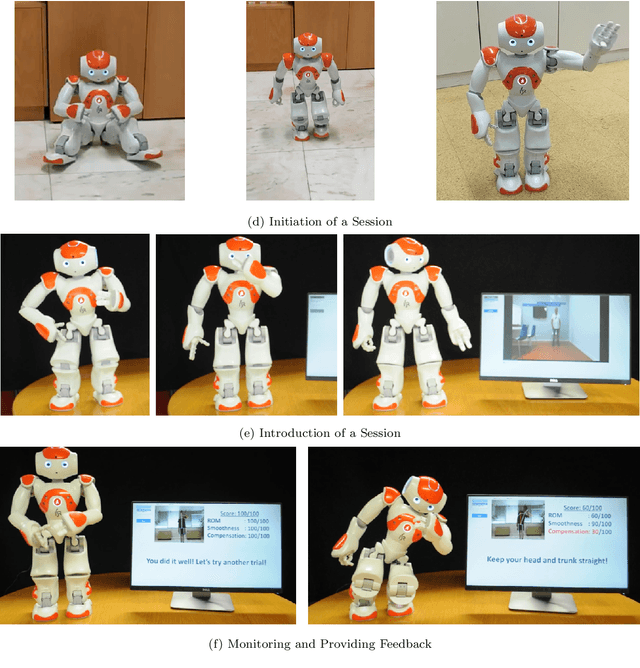
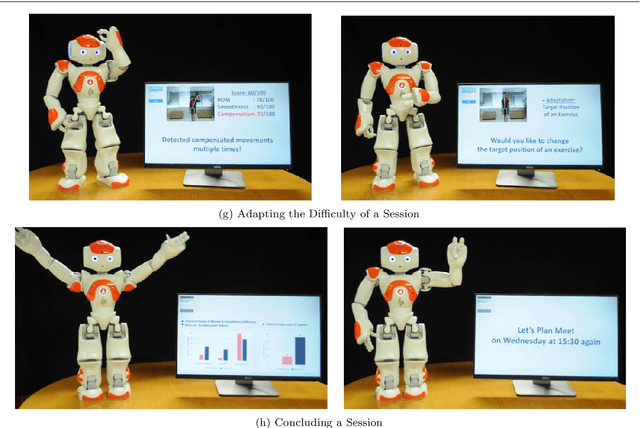
Artificial intelligence (AI) and robotic coaches promise the improved engagement of patients on rehabilitation exercises through social interaction. While previous work explored the potential of automatically monitoring exercises for AI and robotic coaches, the deployment of these systems remains a challenge. Previous work described the lack of involving stakeholders to design such functionalities as one of the major causes. In this paper, we present our efforts on eliciting the detailed design specifications on how AI and robotic coaches could interact with and guide patient's exercises in an effective and acceptable way with four therapists and five post-stroke survivors. Through iterative questionnaires and interviews, we found that both post-stroke survivors and therapists appreciated the potential benefits of AI and robotic coaches to achieve more systematic management and improve their self-efficacy and motivation on rehabilitation therapy. In addition, our evaluation sheds light on several practical concerns (e.g. a possible difficulty with the interaction for people with cognitive impairment, system failures, etc.). We discuss the value of early involvement of stakeholders and interactive techniques that complement system failures, but also support a personalized therapy session for the better deployment of AI and robotic exercise coaches.
Designing Personalized Interaction of a Socially Assistive Robot for Stroke Rehabilitation Therapy
Jul 13, 2020
The research of a socially assistive robot has a potential to augment and assist physical therapy sessions for patients with neurological and musculoskeletal problems (e.g. stroke). During a physical therapy session, generating personalized feedback is critical to improve patient's engagement. However, prior work on socially assistive robotics for physical therapy has mainly utilized pre-defined corrective feedback even if patients have various physical and functional abilities. This paper presents an interactive approach of a socially assistive robot that can dynamically select kinematic features of assessment on individual patient's exercises to predict the quality of motion and provide patient-specific corrective feedback for personalized interaction of a robot exercise coach.
Opportunities of a Machine Learning-based Decision Support System for Stroke Rehabilitation Assessment
Mar 02, 2020
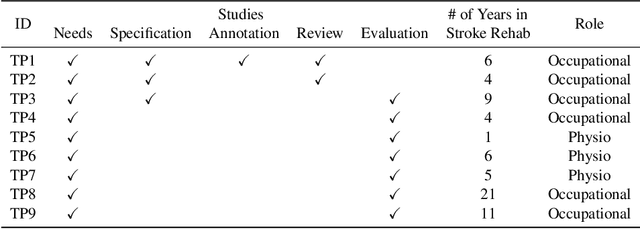
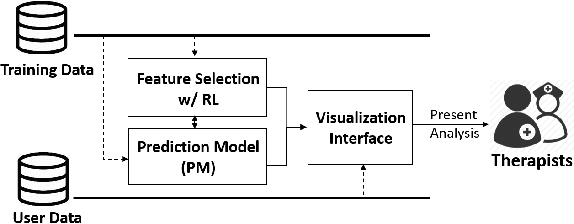

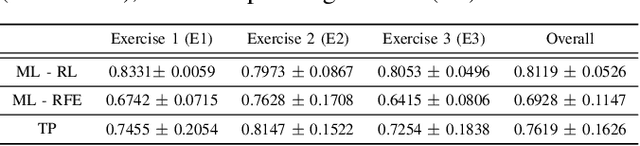
Rehabilitation assessment is critical to determine an adequate intervention for a patient. However, the current practices of assessment mainly rely on therapist's experience, and assessment is infrequently executed due to the limited availability of a therapist. In this paper, we identified the needs of therapists to assess patient's functional abilities (e.g. alternative perspective on assessment with quantitative information on patient's exercise motions). As a result, we developed an intelligent decision support system that can identify salient features of assessment using reinforcement learning to assess the quality of motion and summarize patient specific analysis. We evaluated this system with seven therapists using the dataset from 15 patient performing three exercises. The evaluation demonstrates that our system is preferred over a traditional system without analysis while presenting more useful information and significantly increasing the agreement over therapists' evaluation from 0.6600 to 0.7108 F1-scores ($p <0.05$). We discuss the importance of presenting contextually relevant and salient information and adaptation to develop a human and machine collaborative decision making system.