 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Personalized Interaction of a Socially Assistive Robot for Stroke Rehabilitation Therapy
Paper and Code
Jul 13, 2020
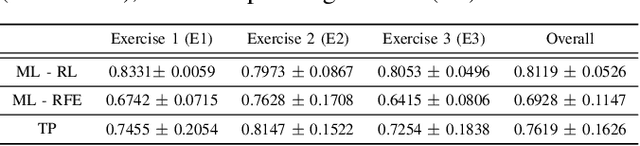
The research of a socially assistive robot has a potential to augment and assist physical therapy sessions for patients with neurological and musculoskeletal problems (e.g. stroke). During a physical therapy session, generating personalized feedback is critical to improve patient's engagement. However, prior work on socially assistive robotics for physical therapy has mainly utilized pre-defined corrective feedback even if patients have various physical and functional abilities. This paper presents an interactive approach of a socially assistive robot that can dynamically select kinematic features of assessment on individual patient's exercises to predict the quality of motion and provide patient-specific corrective feedback for personalized interaction of a robot exercise coach.