 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOneShot Global Localization: Instant LiDAR-Visual Pose Estimation
Mar 31, 2020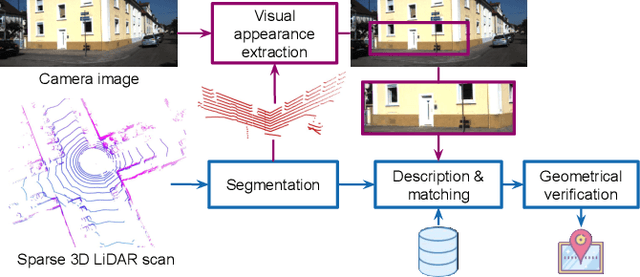

Globally localizing in a given map is a crucial ability for robots to perform a wide range of autonomous navigation tasks. This paper presents OneShot - a global localization algorithm that uses only a single 3D LiDAR scan at a time, while outperforming approaches based on integrating a sequence of point clouds. Our approach, which does not require the robot to move, relies on learning-based descriptors of point cloud segments and computes the full 6 degree-of-freedom pose in a map. The segments are extracted from the current LiDAR scan and are matched against a database using the computed descriptors. Candidate matches are then verified with a geometric consistency test. We additionally present a strategy to further improve the performance of the segment descriptors by augmenting them with visual information provided by a camera. For this purpose, a custom-tailored neural network architecture is proposed. We demonstrate that our LiDAR-only approach outperforms a state-of-the-art baseline on a sequence of the KITTI dataset and also evaluate its performance on the challenging NCLT dataset. Finally, we show that fusing in visual information boosts segment retrieval rates by up to 26% compared to LiDAR-only description.