 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssured Mission Adaptation of UAVs
Jul 21, 2021
The design of systems that can change their behaviour to account for scenarios that were not foreseen at design time remains an open challenge. In this paper we propose an approach for adaptation of mobile robot missions that is not constrained to a predefined set of mission evolutions. We propose applying the MORPH adaptive software architecture to UAVs and show how controller synthesis can be used both to guarantee correct transitioning from the old to the new mission goals while architectural reconfiguration to include new software actuators and sensors if necessary. The architecture brings together architectural concepts that are commonplace in robotics such as temporal planning, discrete, hybrid and continuous control layers together with architectural concepts from adaptive systems such as runtime models and runtime synthesis. We validate the architecture flying several missions taken from the robotic literature for different real and simulated UAVs.
Iterator-Based Temporal Logic Task Planning
Jan 22, 2020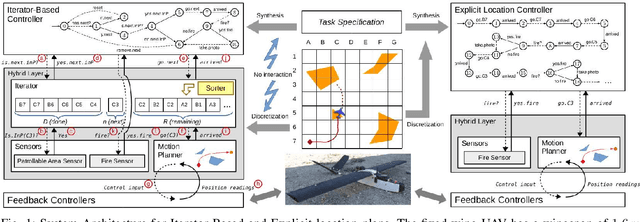

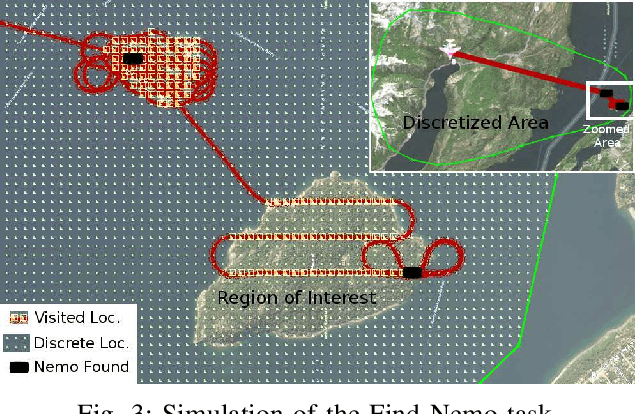
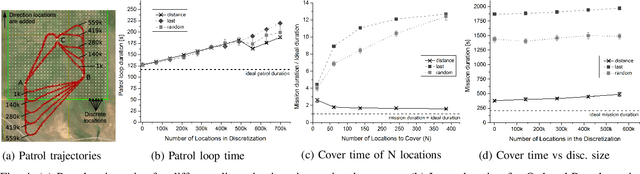
Temporal logic task planning for robotic systems suffers from state explosion when specifications involve large numbers of discrete locations. We provide a novel approach, particularly suited for tasks specifications with universally quantified locations, that has constant time with respect to the number of locations, enabling synthesis of plans for an arbitrary number of them. We propose a hybrid control framework that uses an iterator to manage the discretised workspace hiding it from a plan enacted by a discrete event controller. A downside of our approach is that it incurs in increased overhead when executing a synthesised plan. We demonstrate that the overhead is reasonable for missions of a fixed-wing Unmanned Aerial Vehicle in simulated and real scenarios for up to 700000 locations.
Technical Report: Directed Controller Synthesis of Discrete Event Systems
May 31, 2016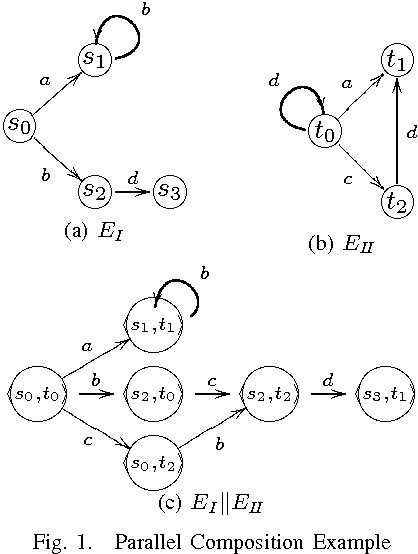

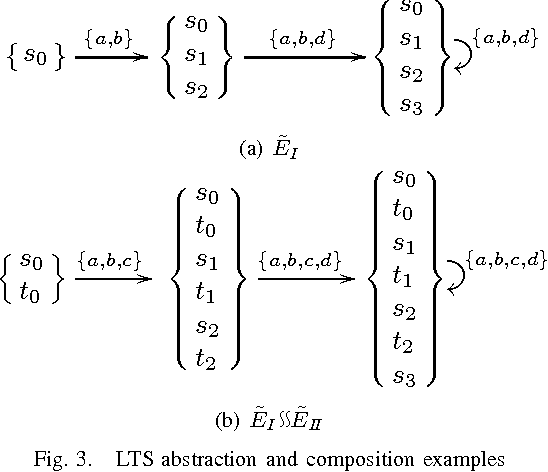
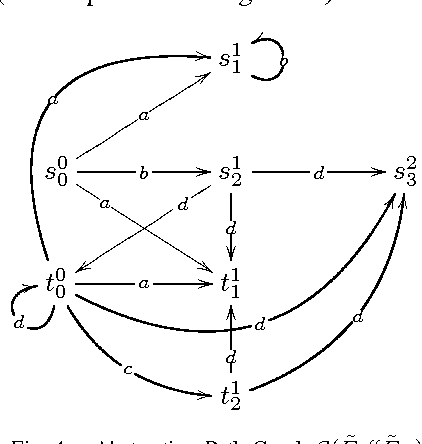
This paper presents a Directed Controller Synthesis (DCS) technique for discrete event systems. The DCS method explores the solution space for reactive controllers guided by a domain-independent heuristic. The heuristic is derived from an efficient abstraction of the environment based on the componentized way in which complex environments are described. Then by building the composition of the components on-the-fly DCS obtains a solution by exploring a reduced portion of the state space. This work focuses on untimed discrete event systems with safety and co-safety (i.e. reachability) goals. An evaluation for the technique is presented comparing it to other well-known approaches to controller synthesis (based on symbolic representation and compositional analyses).