 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterator-Based Temporal Logic Task Planning
Jan 22, 2020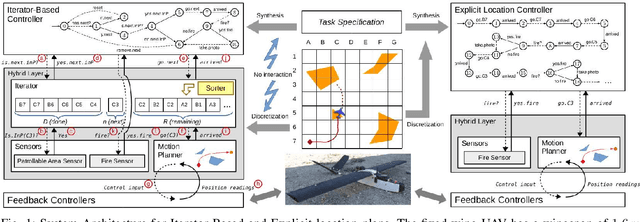

Temporal logic task planning for robotic systems suffers from state explosion when specifications involve large numbers of discrete locations. We provide a novel approach, particularly suited for tasks specifications with universally quantified locations, that has constant time with respect to the number of locations, enabling synthesis of plans for an arbitrary number of them. We propose a hybrid control framework that uses an iterator to manage the discretised workspace hiding it from a plan enacted by a discrete event controller. A downside of our approach is that it incurs in increased overhead when executing a synthesised plan. We demonstrate that the overhead is reasonable for missions of a fixed-wing Unmanned Aerial Vehicle in simulated and real scenarios for up to 700000 locations.