 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText Sanitization Beyond Specific Domains: Zero-Shot Redaction & Substitution with Large Language Models
Nov 16, 2023In the context of information systems, text sanitization techniques are used to identify and remove sensitive data to comply with security and regulatory requirements. Even though many methods for privacy preservation have been proposed, most of them are focused on the detection of entities from specific domains (e.g., credit card numbers, social security numbers), lacking generality and requiring customization for each desirable domain. Moreover, removing words is, in general, a drastic measure, as it can degrade text coherence and contextual information. Less severe measures include substituting a word for a safe alternative, yet it can be challenging to automatically find meaningful substitutions. We present a zero-shot text sanitization technique that detects and substitutes potentially sensitive information using Large Language Models. Our evaluation shows that our method excels at protecting privacy while maintaining text coherence and contextual information, preserving data utility for downstream tasks.
Multi-tier Automated Planning for Adaptive Behavior (Extended Version)
Feb 27, 2020A planning domain, as any model, is never complete and inevitably makes assumptions on the environment's dynamic. By allowing the specification of just one domain model, the knowledge engineer is only able to make one set of assumptions, and to specify a single objective-goal. Borrowing from work in Software Engineering, we propose a multi-tier framework for planning that allows the specification of different sets of assumptions, and of different corresponding objectives. The framework aims to support the synthesis of adaptive behavior so as to mitigate the intrinsic risk in any planning modeling task. After defining the multi-tier planning task and its solution concept, we show how to solve problem instances by a succinct compilation to a form of non-deterministic planning. In doing so, our technique justifies the applicability of planning with both fair and unfair actions, and the need for more efforts in developing planning systems supporting dual fairness assumptions.
Technical Report: Directed Controller Synthesis of Discrete Event Systems
May 31, 2016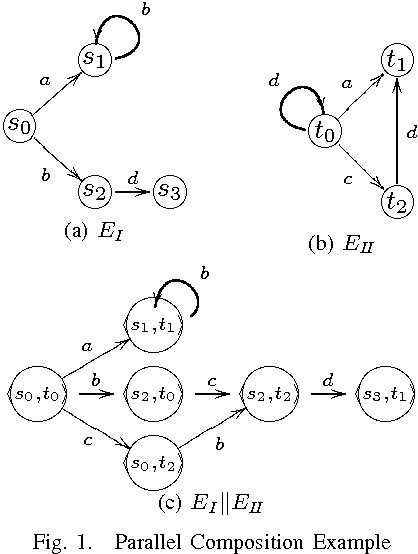

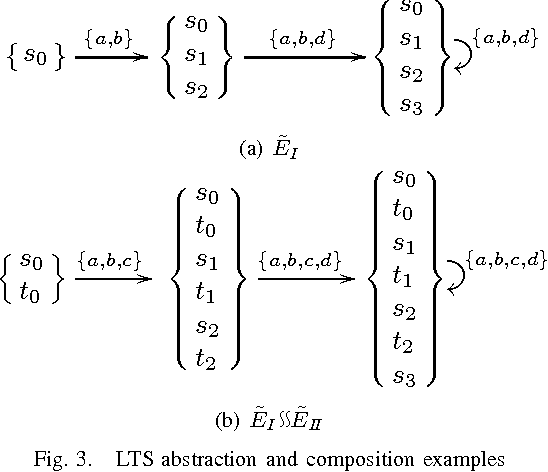
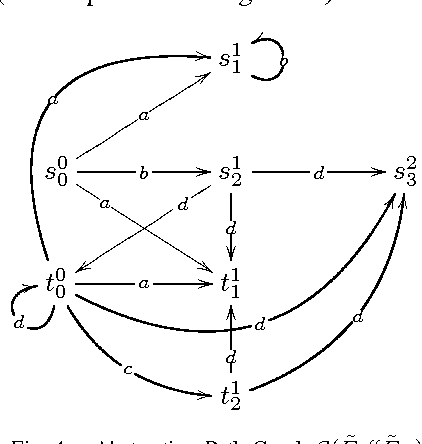
This paper presents a Directed Controller Synthesis (DCS) technique for discrete event systems. The DCS method explores the solution space for reactive controllers guided by a domain-independent heuristic. The heuristic is derived from an efficient abstraction of the environment based on the componentized way in which complex environments are described. Then by building the composition of the components on-the-fly DCS obtains a solution by exploring a reduced portion of the state space. This work focuses on untimed discrete event systems with safety and co-safety (i.e. reachability) goals. An evaluation for the technique is presented comparing it to other well-known approaches to controller synthesis (based on symbolic representation and compositional analyses).