 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report: Directed Controller Synthesis of Discrete Event Systems
Paper and Code
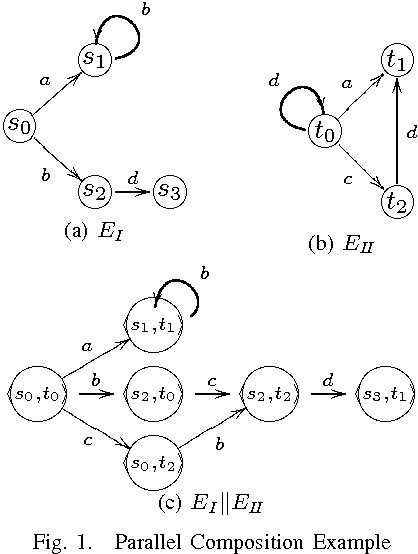

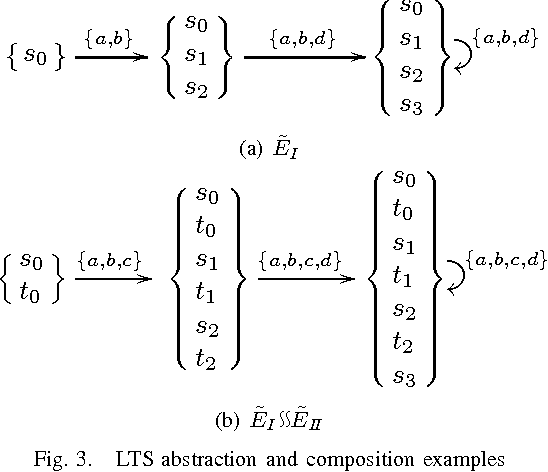
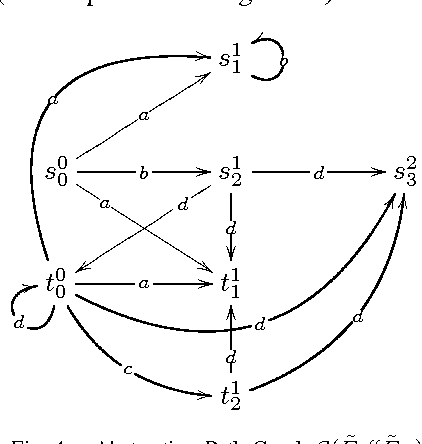
This paper presents a Directed Controller Synthesis (DCS) technique for discrete event systems. The DCS method explores the solution space for reactive controllers guided by a domain-independent heuristic. The heuristic is derived from an efficient abstraction of the environment based on the componentized way in which complex environments are described. Then by building the composition of the components on-the-fly DCS obtains a solution by exploring a reduced portion of the state space. This work focuses on untimed discrete event systems with safety and co-safety (i.e. reachability) goals. An evaluation for the technique is presented comparing it to other well-known approaches to controller synthesis (based on symbolic representation and compositional analyses).