 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient, Responsive, and Robust Hopping on Deformable Terrain
Nov 30, 2023
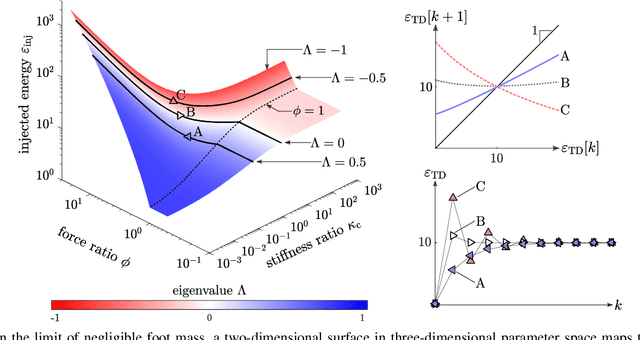

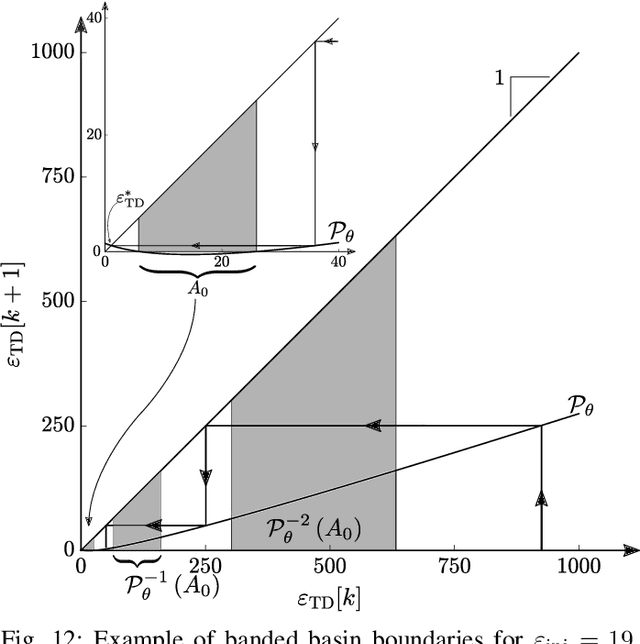
Legged robot locomotion is hindered by a mismatch between applications where legs can outperform wheels or treads, most of which feature deformable substrates, and existing tools for planning and control, most of which assume flat, rigid substrates. In this study we focus on the ramifications of plastic terrain deformation on the hop-to-hop energy dynamics of a spring-legged monopedal hopping robot animated by a switched-compliance energy injection controller. From this deliberately simple robot-terrain model, we derive a hop-to-hop energy return map, and we use physical experiments and simulations to validate the hop-to-hop energy map for a real robot hopping on a real deformable substrate. The dynamical properties (fixed points, eigenvalues, basins of attraction) of this map provide insights into efficient, responsive, and robust locomotion on deformable terrain. Specifically, we identify constant-fixed-point surfaces in a controller parameter space that suggest it is possible to tune control parameters for efficiency or responsiveness while targeting a desired gait energy level. We also identify conditions under which fixed points of the energy map are globally stable, and we further characterize the basins of attraction of fixed points when these conditions are not satisfied. We conclude by discussing the implications of this hop-to-hop energy map for planning, control, and estimation for efficient, agile, and robust legged locomotion on deformable terrain.
Body-terrain interaction affects large bump traversal of insects and legged robots
Nov 01, 2019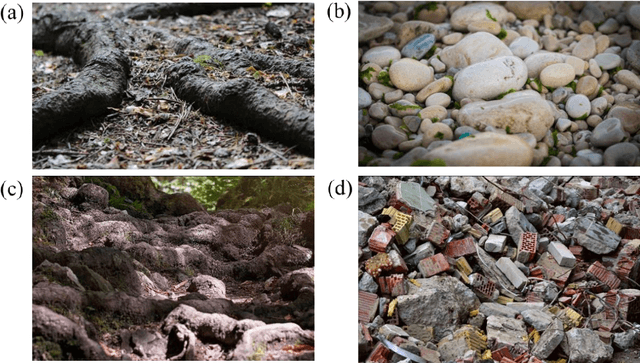
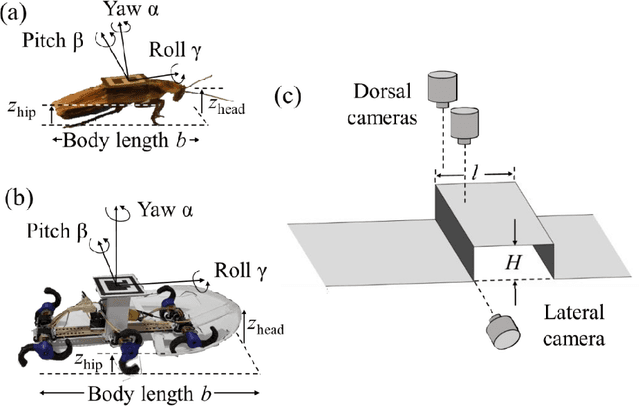
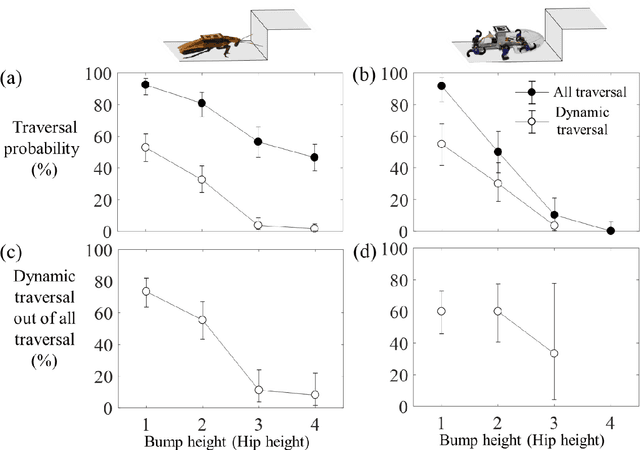
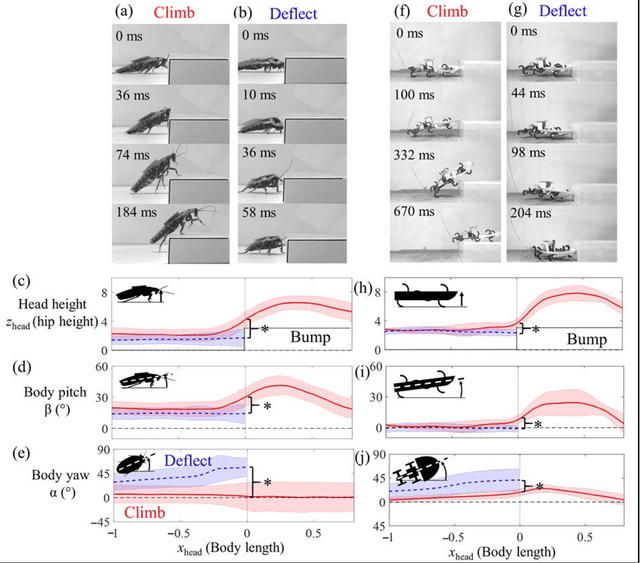
Small animals and robots must often rapidly traverse large bump-like obstacles when moving through complex 3-D terrains, during which, in addition to leg-ground contact, their body inevitably comes into physical contact with the obstacles. However, we know little about the performance limits of large bump traversal and how body-terrain interaction affects traversal. To address these, we challenged the discoid cockroach and an open-loop six-legged robot to dynamically run into a large bump of varying height to discover the maximal traversal performance, and studied how locomotor modes and traversal performance are affected by body-terrain interaction. Remarkably, during rapid running, both the animal and the robot were capable of dynamically traversing a bump much higher than its hip height (up to 4 times the hip height for the animal and 3 times for the robot, respectively) at traversal speeds typical of running, with decreasing traversal probability with increasing bump height. A stability analysis using a novel locomotion energy landscape model explained why traversal was more likely when the animal or robot approached the bump with a low initial body yaw and a high initial body pitch, and why deflection was more likely otherwise. Inspired by these principles, we demonstrated a novel control strategy of active body pitching that increased the robot maximal traversable bump height by 75%. Our study is a major step in establishing the framework of locomotion energy landscapes to understand locomotion in complex 3-D terrains.