 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAPTOR: Rapid Aerial Pickup and Transport of Objects by Robots
Mar 06, 2022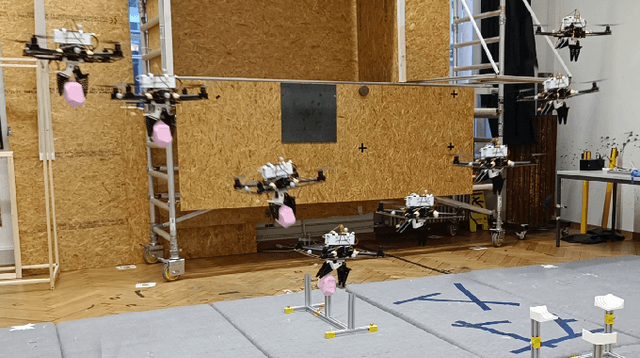

Rapid aerial grasping promises vast applications that utilize the dynamic picking up and placing of objects by robots. Rigid grippers traditionally used in aerial manipulators require very high precision and specific object geometries for successful grasping. We propose RAPTOR, a quadcopter platform combined with a custom Fin Ray gripper to enable a more flexible grasping of objects with different geometries, leveraging the properties of soft materials to increase the contact surface between the gripper and the objects. To reduce the communication latency, we present a novel FastDDS-based middleware solution as an alternative to ROS (Robot Operating System). We show that RAPTOR achieves an average of 83% grasping efficacy in a real-world setting for four different object geometries while moving at an average velocity of 1 m/s during grasping, which is approximately five times faster than the state-of-the-art while supporting up to four times the payload. Our results further solidify the potential of quadcopters in warehouses and other automated pick-and-place applications over longer distances where speed and robustness become essential.