 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Crash Course: Learning Soft and Stylized Falling
Nov 13, 2025Despite recent advances in robust locomotion, bipedal robots operating in the real world remain at risk of falling. While most research focuses on preventing such events, we instead concentrate on the phenomenon of falling itself. Specifically, we aim to reduce physical damage to the robot while providing users with control over a robot's end pose. To this end, we propose a robot agnostic reward function that balances the achievement of a desired end pose with impact minimization and the protection of critical robot parts during reinforcement learning. To make the policy robust to a broad range of initial falling conditions and to enable the specification of an arbitrary and unseen end pose at inference time, we introduce a simulation-based sampling strategy of initial and end poses. Through simulated and real-world experiments, our work demonstrates that even bipedal robots can perform controlled, soft falls.
An Open-Source Soft Robotic Platform for Autonomous Aerial Manipulation in the Wild
Sep 11, 2024



Aerial manipulation combines the versatility and speed of flying platforms with the functional capabilities of mobile manipulation, which presents significant challenges due to the need for precise localization and control. Traditionally, researchers have relied on offboard perception systems, which are limited to expensive and impractical specially equipped indoor environments. In this work, we introduce a novel platform for autonomous aerial manipulation that exclusively utilizes onboard perception systems. Our platform can perform aerial manipulation in various indoor and outdoor environments without depending on external perception systems. Our experimental results demonstrate the platform's ability to autonomously grasp various objects in diverse settings. This advancement significantly improves the scalability and practicality of aerial manipulation applications by eliminating the need for costly tracking solutions. To accelerate future research, we open source our ROS 2 software stack and custom hardware design, making our contributions accessible to the broader research community.
RAPTOR: Rapid Aerial Pickup and Transport of Objects by Robots
Mar 06, 2022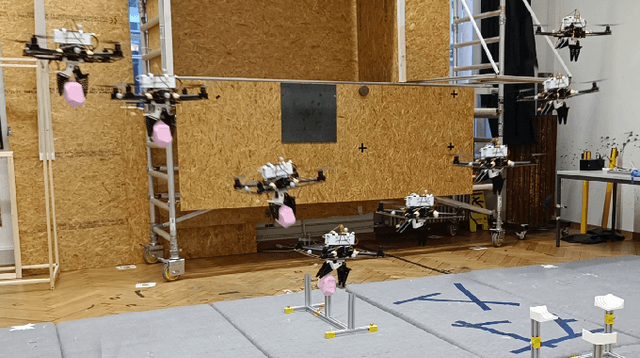

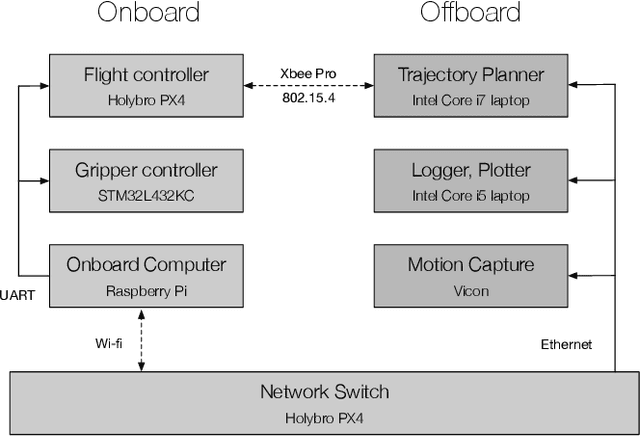
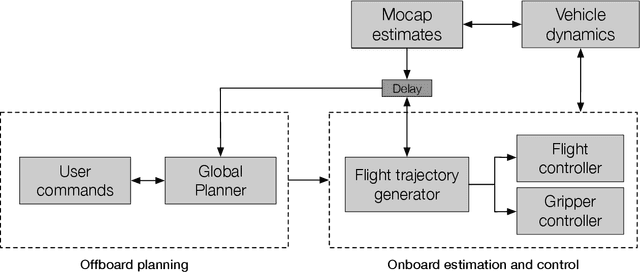
Rapid aerial grasping promises vast applications that utilize the dynamic picking up and placing of objects by robots. Rigid grippers traditionally used in aerial manipulators require very high precision and specific object geometries for successful grasping. We propose RAPTOR, a quadcopter platform combined with a custom Fin Ray gripper to enable a more flexible grasping of objects with different geometries, leveraging the properties of soft materials to increase the contact surface between the gripper and the objects. To reduce the communication latency, we present a novel FastDDS-based middleware solution as an alternative to ROS (Robot Operating System). We show that RAPTOR achieves an average of 83% grasping efficacy in a real-world setting for four different object geometries while moving at an average velocity of 1 m/s during grasping, which is approximately five times faster than the state-of-the-art while supporting up to four times the payload. Our results further solidify the potential of quadcopters in warehouses and other automated pick-and-place applications over longer distances where speed and robustness become essential.