 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzy Logic Control for Indoor Navigation of Mobile Robots
Sep 04, 2024



Autonomous mobile robots have many applications in indoor unstructured environment, wherein optimal movement of the robot is needed. The robot therefore needs to navigate in unknown and dynamic environments. This paper presents an implementation of fuzzy logic controller for navigation of mobile robot in an unknown dynamically cluttered environment. Fuzzy logic controller is used here as it is capable of making inferences even under uncertainties. It helps in rule generation and decision making process in order to reach the goal position under various situations. Sensor readings from the robot and the desired direction of motion are inputs to the fuzz logic controllers and the acceleration of the respective wheels are the output of the controller. Hence, the mobile robot avoids obstacles and reaches the goal position. Keywords: Fuzzy Logic Controller, Membership Functions, Takagi-Sugeno-Kang FIS, Centroid Defuzzification
Occlusion-Based Cooperative Transport for Concave Objects with a Swarm of Miniature Mobile Robots
Sep 04, 2024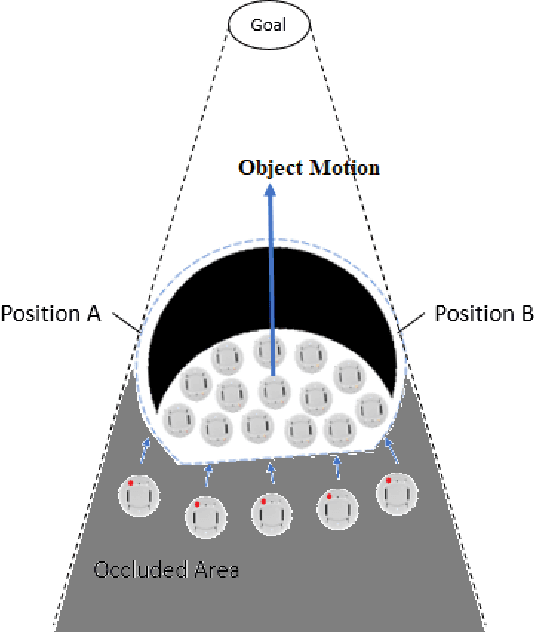
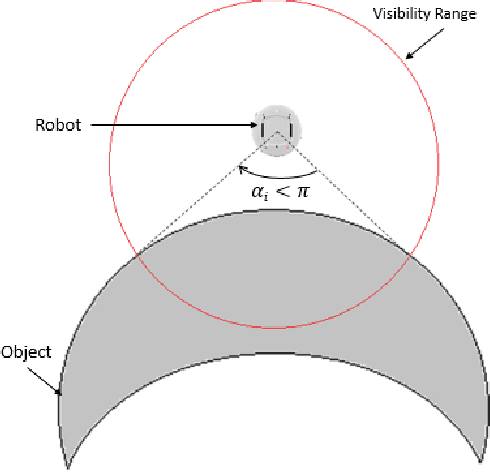
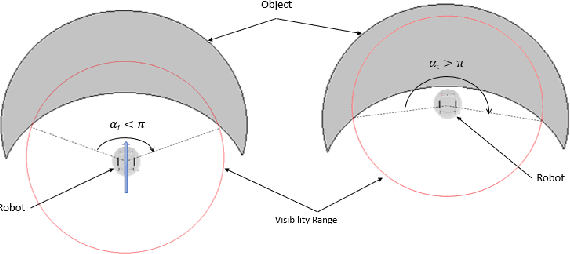
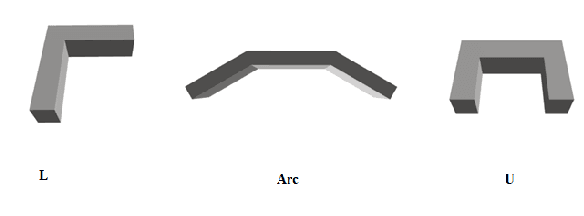
An occlusion based strategy for collective transport of a concave object using a swarm of mobile robots has been proposed in this paper. We aim to overcome the challenges of transporting concave objects using decentralized approach. The interesting aspect of this task is that the agents have no prior knowledge about the geometry of the object and do not explicitly communicate with each other. The concept is to eliminate the concavity of the object by filling a number of robots in its cavity and then carry out an occlusion based transport strategy on the newly formed convex object or "pseudo object". We divide our work into two parts: concavity filling of various concave objects and occlusion based collective transport of convex objects.
Kinematics & Dynamics Library for Baxter Arm
Sep 01, 2024



The Baxter robot is a standard research platform used widely in research tasks, supported with an SDK provided by the developers, Rethink Robotics. Despite the ubiquitous use of the robot, the official software support is sub-standard. Especially, the native IK service has a low success rate and is often inconsistent. This unreliable behavior makes Baxter difficult to use for experiments and the research community is in need of a more reliable software support to control the robot. We present our work towards creating a Python based software library supporting the kinematics and dynamics of the Baxter robot. Our toolbox contains implementation of pose and velocity kinematics with support for Jacobian operations for redundancy resolution. We present the implementation and performance of our library, along with a comparison with PyKDL. Keywords- Baxter Research Robot, Manipulator Kinematics, Iterative IK, Dynamical Model, Redundant Manipulator
Automated Cinematography Motion Planning for UAVs
Sep 01, 2024



This project aimed to develop an automated cinematography platform using an unmanned aerial vehicle. Quadcopters are a great platform for shooting aerial scenes but are difficult to maneuver smoothly and can require expertise to pilot. We aim to design an algorithm to enable automated cinematography of a desired object of interest. Given the location of an object and other obstacles in the environment, the drone is able to plan its trajectory while simultaneously keeping the desired object in the video frame and avoiding obstacles. The high maneuverability of quadcopter platforms coupled with the desire for smooth movement and stability from camera platforms means a robust motion planning algorithm must be developed which can take advantage of the quadcopter's abilities while creating motion paths which satisfy the ultimate goal of capturing aerial video. This project aims to research, develop, simulate, and test such an algorithm.
Detection, Recognition and Pose Estimation of Tabletop Objects
Sep 01, 2024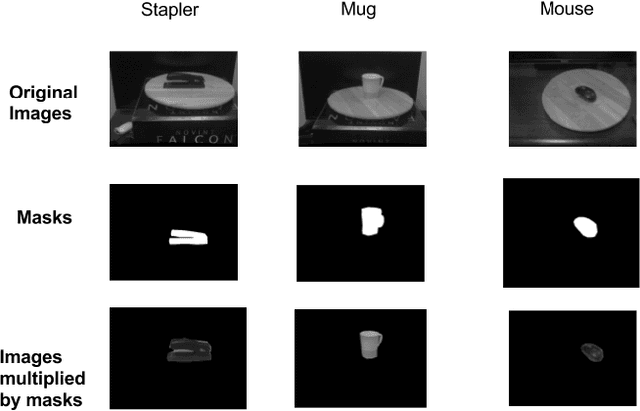
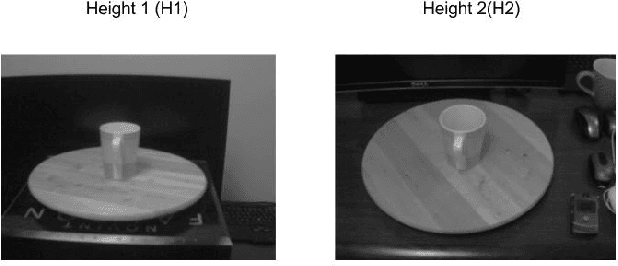
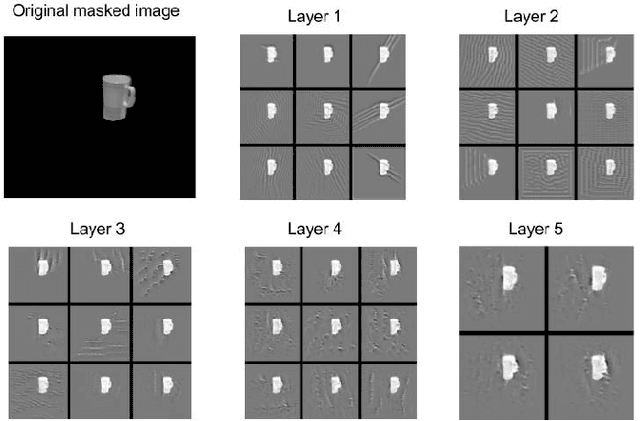
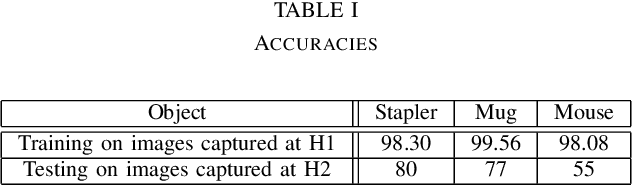
The problem of cleaning a messy table using Deep Neural Networks is a very interesting problem in both social and industrial robotics. This project focuses on the social application of this technology. A neural network model that is capable of detecting and recognizing common tabletop objects, such as a mug, mouse, or stapler is developed. The model also predicts the angle at which these objects are placed on a table,with respect to some reference. Assuming each object has a fixed intended position and orientation on the tabletop, the orientation of a particular object predicted by the deep learning model can be used to compute the transformation matrix to move the object from its initial position to the intended position. This can be fed to a pick and place robot to carry out the transfer.This paper talks about the deep learning approaches used in this project for object detection and orientation estimation.