 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOcclusion-Based Cooperative Transport for Concave Objects with a Swarm of Miniature Mobile Robots
Sep 04, 2024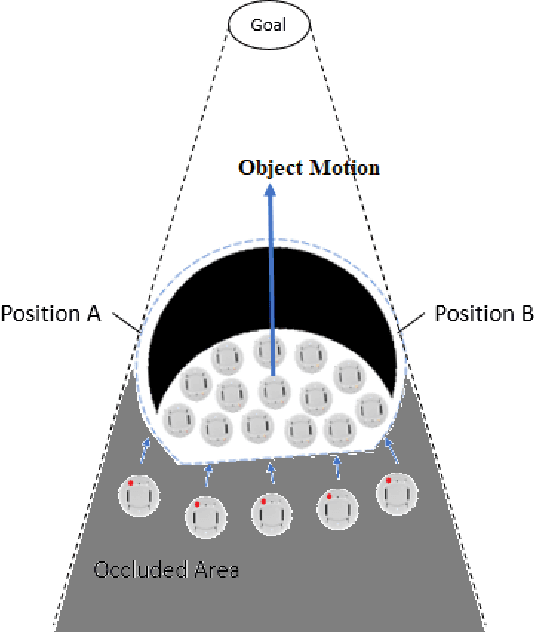
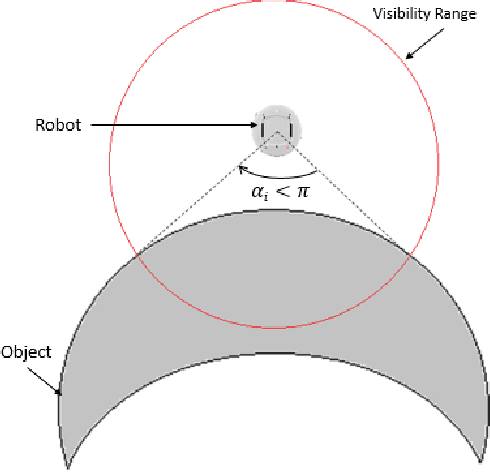
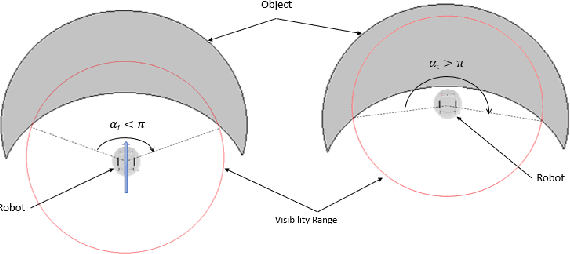
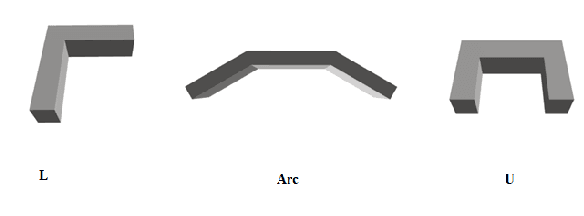
An occlusion based strategy for collective transport of a concave object using a swarm of mobile robots has been proposed in this paper. We aim to overcome the challenges of transporting concave objects using decentralized approach. The interesting aspect of this task is that the agents have no prior knowledge about the geometry of the object and do not explicitly communicate with each other. The concept is to eliminate the concavity of the object by filling a number of robots in its cavity and then carry out an occlusion based transport strategy on the newly formed convex object or "pseudo object". We divide our work into two parts: concavity filling of various concave objects and occlusion based collective transport of convex objects.
Automated Cinematography Motion Planning for UAVs
Sep 01, 2024



This project aimed to develop an automated cinematography platform using an unmanned aerial vehicle. Quadcopters are a great platform for shooting aerial scenes but are difficult to maneuver smoothly and can require expertise to pilot. We aim to design an algorithm to enable automated cinematography of a desired object of interest. Given the location of an object and other obstacles in the environment, the drone is able to plan its trajectory while simultaneously keeping the desired object in the video frame and avoiding obstacles. The high maneuverability of quadcopter platforms coupled with the desire for smooth movement and stability from camera platforms means a robust motion planning algorithm must be developed which can take advantage of the quadcopter's abilities while creating motion paths which satisfy the ultimate goal of capturing aerial video. This project aims to research, develop, simulate, and test such an algorithm.